TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155241
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024058949
出願日
2024-04-01
発明の名称
制御システム、情報処理装置、プログラム及び制御方法
出願人
プレティア・テクノロジーズ株式会社
代理人
個人
主分類
G05D
1/229 20240101AFI20251006BHJP(制御;調整)
要約
【課題】モビリティの自律的な動作を簡易に制御することができる制御システム、情報処理装置、プログラム及び制御方法を提供する。
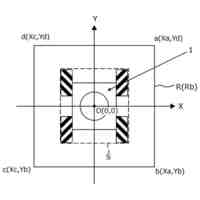
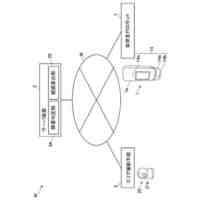
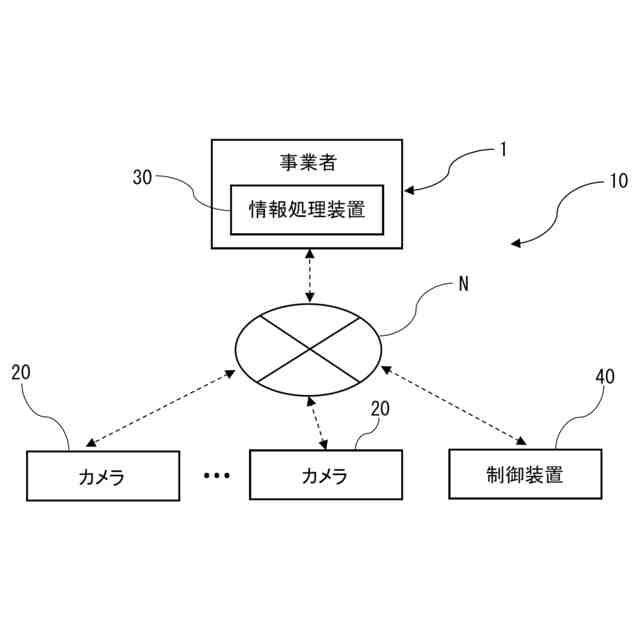
【解決手段】モビリティの動作を動作情報として検知する検知装置と、検知装置で検知したモビリティの動作情報に基づいてモビリティが動作する空間領域を把握する情報処理装置と、情報処理装置で把握した空間領域に基づいてモビリティの自律的な動作を制御する制御装置と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
モビリティの動作を動作情報として検知する検知装置と、
該検知装置で検知した前記モビリティの前記動作情報に基づいて前記モビリティが動作する空間領域を把握する情報処理装置と、
該情報処理装置で把握した前記空間領域に基づいて前記モビリティの自律的な動作を制御する制御装置と、
を備える制御システム。
続きを表示(約 1,700 文字)
【請求項2】
前記情報処理装置は、
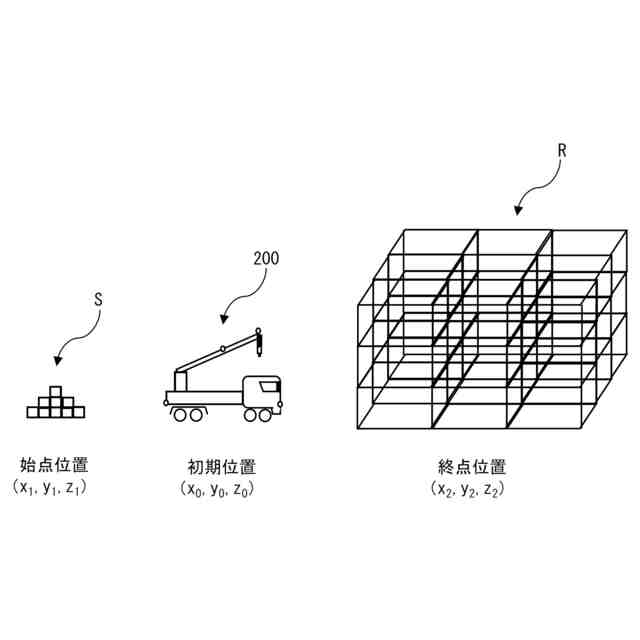
前記空間領域に対する前記モビリティの初期位置、前記モビリティの動作の始点位置及び前記モビリティの動作の終点位置の入力を受け付ける受付処理を実行する、
請求項1に記載の制御システム。
【請求項3】
前記情報処理装置は、
前記空間領域に対する前記モビリティの初期位置、前記モビリティの動作の始点位置及び前記モビリティの動作の終点位置の入力を受け付ける受付処理と、
該受付処理で受け付けた前記初期位置、前記始点位置及び前記終点位置に基づいて前記空間領域において前記モビリティが動作する経路を算出する経路算出処理と、を実行する、
請求項1または2に記載の制御システム。
【請求項4】
前記情報処理装置は、
前記モビリティが動作している際に前記検知装置が前記空間領域で物体を検知した場合に検知した前記物体を物体確認情報として把握する物体把握処理を実行し、
前記制御装置は、
前記物体把握処理で把握した前記物体確認情報に基づいて前記モビリティの自律的な動作を制御する、
請求項1または2に記載の制御システム。
【請求項5】
複数の前記検知装置が前記モビリティに設けられ、
前記情報処理装置は、
複数の前記検知装置で前記動作情報を検知した際の時刻を基準として複数の前記検知装置で検知したそれぞれの前記動作情報を同期する同期処理を実行する、
請求項1または2に記載の制御システム。
【請求項6】
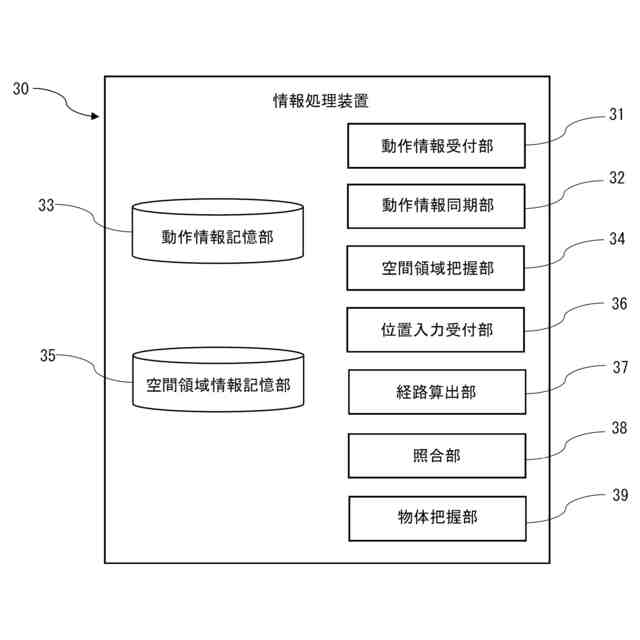
プロセッサ、及びプログラムが記憶されたメモリを備える情報処理装置であって、
前記プロセッサにより前記プログラムが実行されることによって、
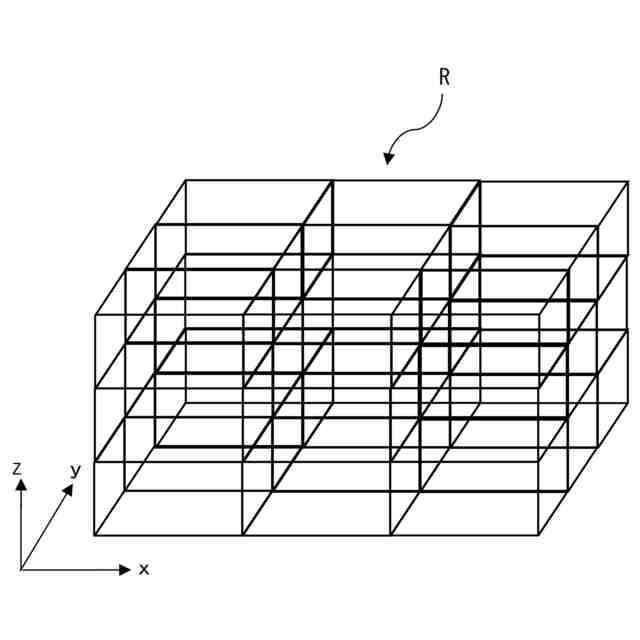
モビリティの動作を動作情報として検知する検知装置で検知した前記モビリティの前記動作情報に基づいて前記モビリティが動作する空間領域を把握する空間領域把握処理と、
該空間領域把握処理で把握した前記空間領域に対する前記モビリティの初期位置、前記モビリティの動作の始点位置及び前記モビリティの動作の終点位置の入力を受け付ける受付処理と、
該受付処理で受け付けた前記初期位置、前記始点位置及び前記終点位置に基づいて前記空間領域において前記モビリティが動作する経路を算出する経路算出処理と、
を実行する情報処理装置。
【請求項7】
コンピュータによって実装される情報処理装置に、
モビリティの動作を動作情報として検知する検知装置で検知した前記モビリティの前記動作情報に基づいて前記モビリティが動作する空間領域を把握する空間領域把握処理と、
該空間領域把握処理で把握した前記空間領域に対する前記モビリティの初期位置、前記モビリティの動作の始点位置及び前記モビリティの動作の終点位置の入力を受け付ける受付処理と、
該受付処理で受け付けた前記初期位置、前記始点位置及び前記終点位置に基づいて前記空間領域において前記モビリティが動作する経路を算出する経路算出処理と、
を実行させるプログラム。
【請求項8】
コンピュータによって実装される情報処理装置が、
モビリティの動作を動作情報として検知する検知装置で検知した前記モビリティの前記動作情報に基づいて前記モビリティが動作する空間領域を把握する空間領域把握処理と、
該空間領域把握処理で把握した前記空間領域に対する前記モビリティの初期位置、前記モビリティの動作の始点位置及び前記モビリティの動作の終点位置の入力を受け付ける受付処理と、
該受付処理で受け付けた前記初期位置、前記始点位置及び前記終点位置に基づいて前記空間領域において前記モビリティが動作する経路を算出する経路算出処理と、を実行し、
コンピュータによって実装される制御装置が、
前記経路算出処理で算出した前記経路に基づいて前記モビリティの自律的な動作を制御する、
制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム、情報処理装置、プログラム及び制御方法、特に、モビリティを制御する制御システム、情報処理装置、プログラム及び制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
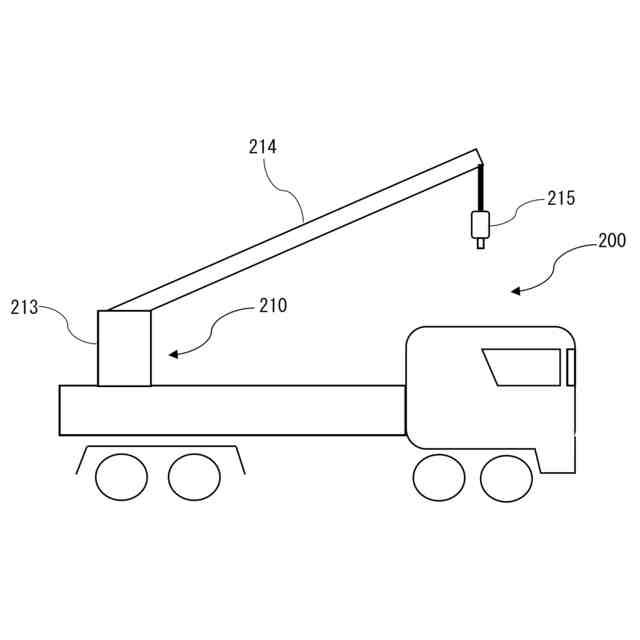
近年、自律的に走行あるいは駆動するモビリティに関する技術が進展しており、たとえば、任意の空間あるいは領域において、クレーン車両等の大型重機、ドローン等の飛行体あるいは倉庫内等で荷物の仕分けを行うロボットといった各種のモビリティが自律的に走行する、あるいは自律的に駆動するように制御する技術が提案されている。
【0003】
特許文献1には、自律移動体の出発地点と到着地点とを設定し、この出発地点と到着地点とから自律移動体の経路情報を生成し、生成した経路情報に基づいて自律移動体の移動を制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-112671公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、モビリティの自律的な動作を制御するに際しては、たとえば地図情報やモビリティが動作する現地の地理情報等に基づいて、モビリティが移動する経路情報やモビリティが動作する動作範囲に関する情報を予め設定しておく必要がある。
【0006】
このような情報を予め設定しておく作業は、場合によっては現地の地理情報等を予め作成する必要がある場合もあり、そのような場合には設定に要する工程が多くなることが想定され、かつ精緻な情報を設定する必要があることが想定されることから、モビリティの自律的な動作に関する制御を実行する際の作業負担が増大することが懸念される。
【0007】
本発明は、上記事情に鑑みてなされたものであり、モビリティの自律的な動作を簡易に制御することができる制御システム、情報処理装置、プログラム及び制御方法を提供することを課題とするものである。
【課題を解決するための手段】
【0008】
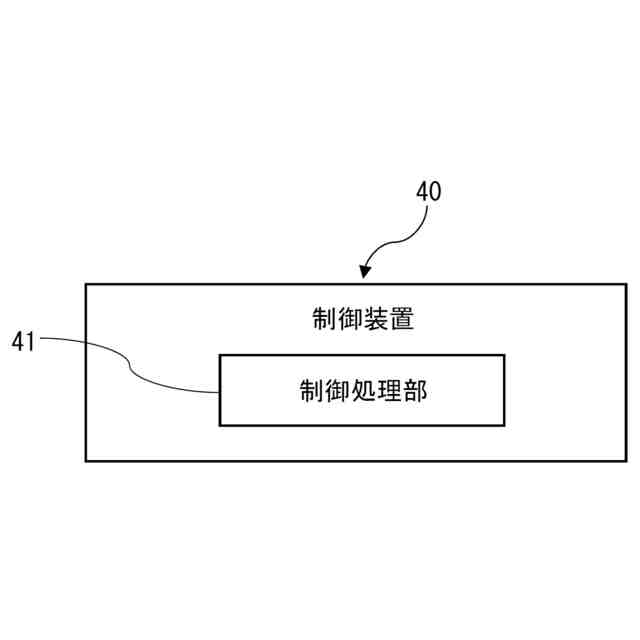
上記目的を達成するための本発明に係る制御システムは、モビリティの動作を動作情報として検知する検知装置と、検知装置で検知したモビリティの動作情報に基づいてモビリティが動作する空間領域を把握する情報処理装置と、情報処理装置で把握した空間領域に基づいてモビリティの自律的な動作を制御する制御装置と、を備えるものである。
【0009】
これによれば、モビリティが動作する際に検知装置が検知する動作情報に基づいて、モビリティが動作する空間領域を把握することから、把握した空間領域に基づいて、モビリティの自律的な動作を簡易に制御することができる。
【0010】
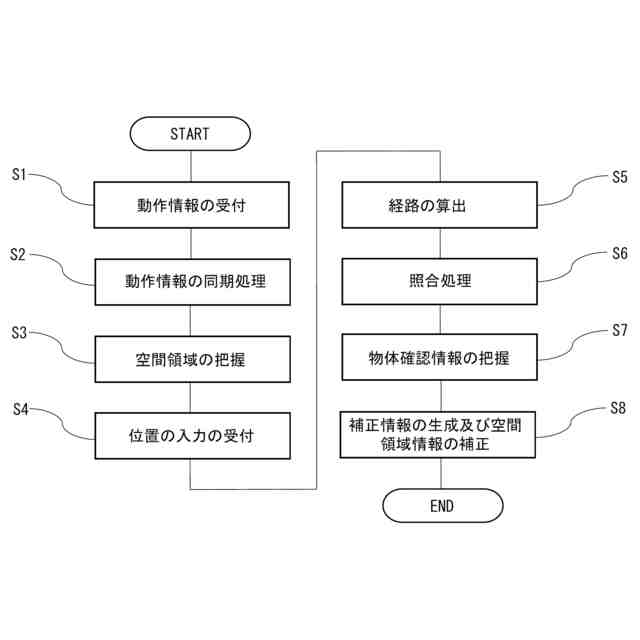
この制御システムの情報処理装置は、空間領域に対するモビリティの初期位置、モビリティの動作の始点位置及びモビリティの動作の終点位置の入力を受け付ける受付処理を実行するとともに、受付処理で受け付けた初期位置、始点位置及び終点位置に基づいて空間領域においてモビリティが動作する経路を算出する経路算出処理と、を実行するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社熊谷組
障害物の検出方法
21日前
愛知製鋼株式会社
車両用システム
2か月前
ローム株式会社
基準電圧源
1か月前
新電元工業株式会社
作業用ロボット
19日前
個人
作業車両自動化システム
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
26日前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
減圧弁
2か月前
株式会社ダイフク
物品搬送設備
今日
マーク ヘイリー
消防ロボット
3か月前
トヨタ自動車株式会社
制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
15日前
カヤバ株式会社
減圧弁
28日前
キヤノン株式会社
配送システム
1か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
村田機械株式会社
搬送車システム
20日前
株式会社CAOS
移動体の制御システム
1か月前
株式会社アマダ
工作機械制御装置
20日前
日野自動車株式会社
自動運転装置
20日前
株式会社TMEIC
安全性診断装置
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ