TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112854
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007366
出願日
2024-01-22
発明の名称
モータ駆動制御装置、アクチュエータ、およびモータ駆動制御方法
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
H02P
8/14 20060101AFI20250725BHJP(電力の発電,変換,配電)
要約
【課題】モータの動作の安定性を損なうことなく、モータの回転速度を上げる。
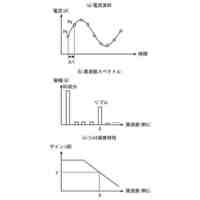
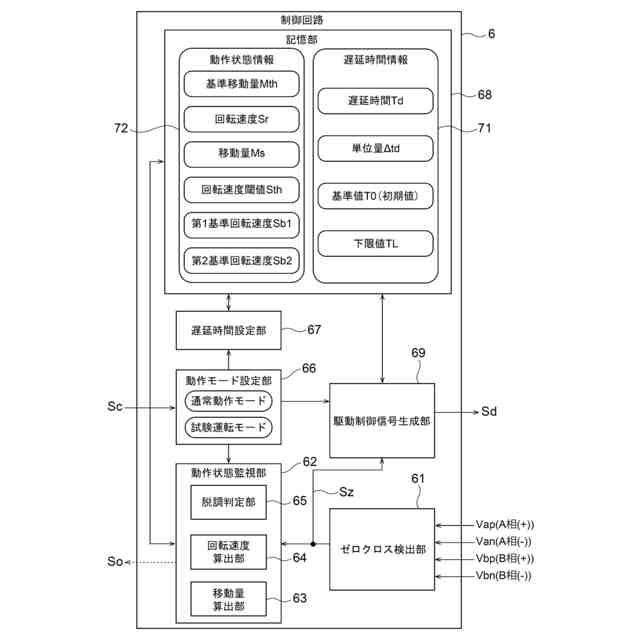
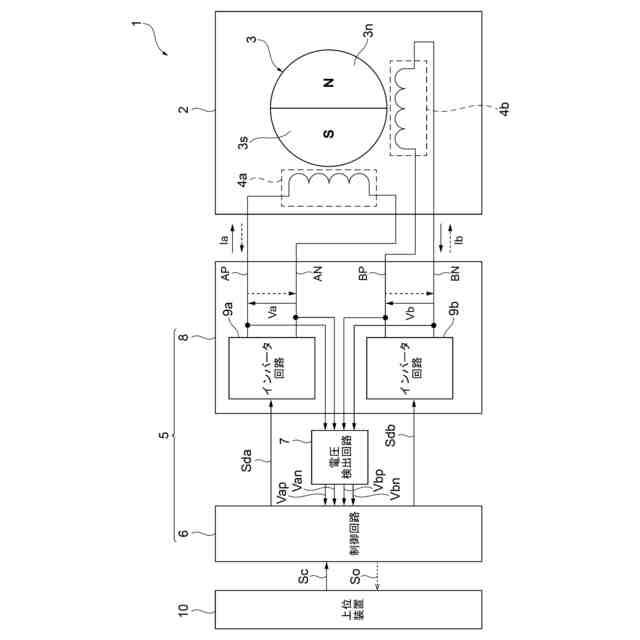
【解決手段】モータ駆動制御装置5において制御回路6は、モータ2の非通電相のコイル4に発生した逆起電圧のゼロクロスを検出するゼロクロス検出部61と、コイル4の転流時の遅延時間Tdを設定する遅延時間設定部67と、上記ゼロクロスが検出されてから遅延時間Tdの経過後にコイル4の転流を行うように駆動制御信号Sdを生成する駆動制御信号生成部69と、モータ2の動作状態を監視する動作状態監視部62とを有し、遅延時間設定部67は、遅延時間Tdを基準値T0に設定し、モータ2の動作状態が所定条件を満足したことを検出した場合に、遅延時間Tdを基準値T0より短くする。
【選択図】図3
特許請求の範囲
【請求項1】
複数相のコイルを有するモータの駆動を制御するための駆動制御信号を生成する制御回路と、
前記駆動制御信号に基づいて、前記コイルを駆動する駆動回路と、
前記コイルの電圧を検出する電圧検出回路と、を備え、
前記制御回路は、
前記電圧検出回路によって検出された電圧に基づいて、非通電相の前記コイルに発生した逆起電圧のゼロクロスを検出するゼロクロス検出部と、
前記コイルの転流時の遅延時間を設定する遅延時間設定部と、
前記ゼロクロス検出部によって前記ゼロクロスが検出されてから前記遅延時間の経過後に前記コイルの転流を行うように前記駆動制御信号を生成する駆動制御信号生成部と、
前記モータの動作状態を監視する動作状態監視部と、を有し、
前記遅延時間設定部は、前記遅延時間を基準値に設定し、前記動作状態監視部による監視結果に基づいて前記動作状態が所定条件を満足したことを検出した場合に、前記遅延時間を前記基準値より短くする
モータ駆動制御装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のモータ駆動制御装置において、
前記モータの駆動に関する動作モードを設定する動作モード設定部を更に有し、
前記動作モードとして、通常動作モードと試験運転モードとを含み、
前記動作状態監視部による監視結果は、前記モータの回転速度と前記モータの移動量とを含み、
前記動作モードが前記通常動作モードに設定されている場合の前記所定条件は、前記回転速度が第1基準回転速度以上であることを含み、
前記動作モードが前記試験運転モードに設定されている場合の前記所定条件は、前記移動量が基準移動量に到達したことを含む
モータ駆動制御装置。
【請求項3】
請求項2に記載のモータ駆動制御装置において、
前記遅延時間設定部は、前記動作モードが前記試験運転モードに設定された場合に、前記遅延時間を前記基準値に設定し、前記移動量が前記基準移動量に到達したことを検出したとき、前記遅延時間を前記基準値から前記基準値より小さい値に変更する
モータ駆動制御装置。
【請求項4】
請求項2に記載のモータ駆動制御装置において、
前記第1基準回転速度より大きい第2基準回転速度が設定され、
前記動作モードが前記通常動作モードに設定されている場合の前記所定条件は、前記回転速度が前記第2基準回転速度以上且つ前記第1基準回転速度より小さい状態において、前記回転速度が直前に取得した値よりも上昇していることを含む
モータ駆動制御装置。
【請求項5】
請求項4に記載のモータ駆動制御装置において、
前記遅延時間設定部は、前記動作モードが前記通常動作モードに設定されているとき、前記動作状態が前記所定条件を満足したことを検出した場合に、前記遅延時間をそのとき設定されている値から単位量だけ短縮する遅延時間短縮処理を実行する
モータ駆動制御装置。
【請求項6】
請求項5に記載のモータ駆動制御装置において、
前記遅延時間設定部は、前記動作モードが前記通常動作モードに設定されているとき、前記回転速度が前記第2基準回転速度以上且つ前記第1基準回転速度より小さい状態において、前記回転速度が直前に取得した値より上昇していない場合には、前記遅延時間をそのとき設定されている値から前記単位量だけ延長する遅延時間延長処理を実行する
モータ駆動制御装置。
【請求項7】
請求項6に記載のモータ駆動制御装置において、
前記遅延時間設定部は、前記回転速度が前記第2基準回転速度より小さい場合に、前記遅延時間を初期値に戻す
モータ駆動制御装置。
【請求項8】
請求項7に記載のモータ駆動制御装置において、
前記モータの脱調を判定するための、前記第2基準回転速度より小さい閾値が設定され、
前記動作状態監視部は、前記回転速度が前記閾値より小さい場合に、前記モータが脱調していると判定する
モータ駆動制御装置。
【請求項9】
前記モータと、
請求項1乃至8の何れか一項に記載のモータ駆動制御装置と、を備える
アクチュエータ。
【請求項10】
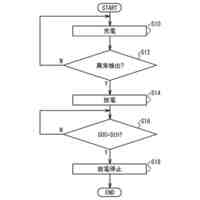
複数相のコイルを有するモータの駆動を制御するためのモータ制御方法であって、
非通電相の前記コイルに発生した逆起電圧のゼロクロスを検出する第1ステップと、
前記コイルの転流時の遅延時間を設定する第2ステップと、
前記第1ステップにおいて前記ゼロクロスが検出されてから、前記遅延時間の経過後に前記コイルの転流を行うように前記モータを駆動する第3ステップと、
前記モータの動作状態を監視する第4ステップと、を含み、
前記第2ステップは、
前記遅延時間を基準値に設定する第5ステップと、
前記第4ステップにおいて監視した前記モータの動作状態が所定条件を満足した場合に、前記遅延時間を前記基準値より短くする第6ステップと、を含む
モータ駆動制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ駆動制御装置、アクチュエータ、およびモータ駆動制御方法に関し、例えば、ステッピングモータを駆動するためのモータ駆動制御装置、当該モータ駆動制御装置を搭載したアクチュエータ、およびステッピングモータを駆動するためのモータ駆動制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
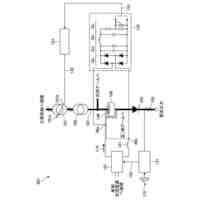
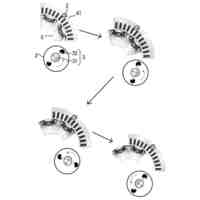
従来、車載用途の空調ユニットとしてのHVAC(Heating Ventilation and Air-Conditioning)システムにおける空調装置等を駆動するためのステッピングモータ(以下、単に「モータ」とも称する。)の駆動制御方法として、モータのコイルの逆起電圧のゼロクロスの検出に応じてコイルの転流を行う手法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-173628号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータにおけるコイルの逆起電圧のゼロクロスの検出に応じてコイルの転流を行う手法によれば、負荷が軽いほどモータの回転速度が速くなり、負荷が重いほど回転速度が遅くなるようにモータを駆動するので、モータの負荷に応じた適切なトルクおよび回転速度でモータを回転させることができる。
【0005】
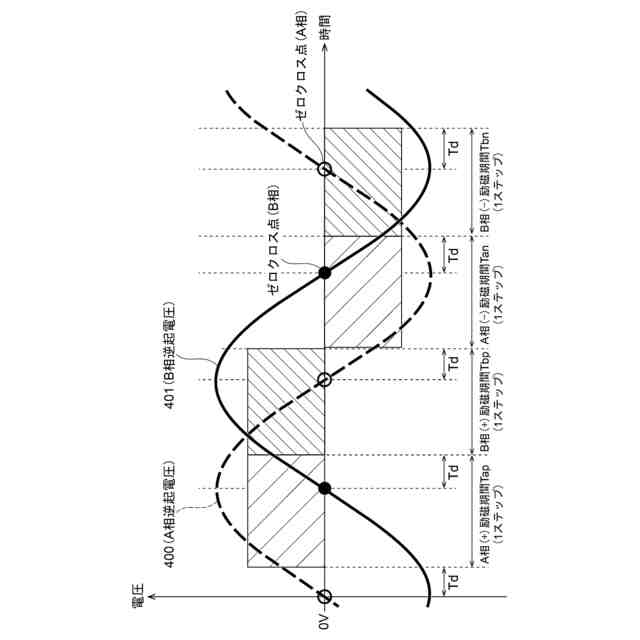
ところで、上記手法によるモータの駆動をより安定させるために、コイルの転流の切替え時に遅延時間が設定される場合がある。すなわち、逆起電圧のゼロクロスの検出後に速やかにコイルの転流を行うのではなく、逆起電圧のゼロクロスを検出してから所定時間(遅延時間)の経過後に、コイルの転流を行う。
【0006】
転流時の遅延時間を長くすることにより、トルクがより大きくなるので、脱調の発生を抑えてモータの動作を安定させることができる。その一方で、転流時の遅延時間をゼロクロスから電流波形の周期の2分の1よりも長くすると、モータの回転速度が遅くなり、モータを目標の回転位置まで回転させるために要する時間が長くなる。そのため、モータが適用されるシステム毎に要求されるモータの回転速度および安定性を考慮して、システム毎に遅延時間の値を予め設定する必要がある。
【0007】
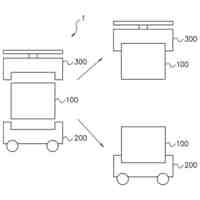
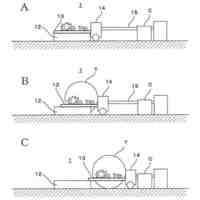
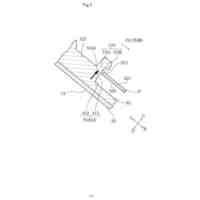
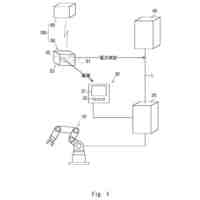
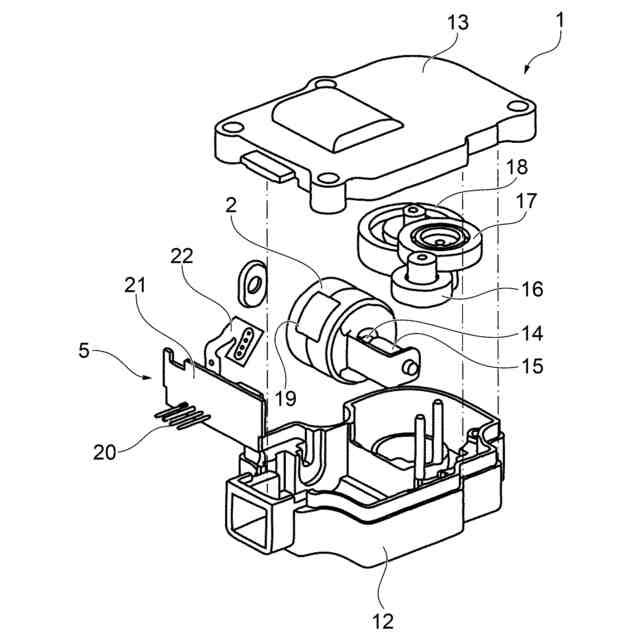
しかしながら、モータが適用されるシステムが同一であっても、負荷変動等によりモータの動作条件が変化する場合があるため、転流時の最適な遅延時間を予め見つけ出すことは容易ではない。例えば、アクチュエータ1の製造段階または検査段階において、アクチュエータの駆動部分(ギア等)にグリスを塗布した後にモータを所定量動作させてグリスをなじませる処理を行う場合がある。この処理を行う際にはモータの負荷が最も軽い状態であることから、転流時の遅延時間を短くすることにより、上記処理をできるだけ短時間に終了させることが好ましい。一方で、HVACシステムの導入後においては、モータの負荷が変動するため、遅延時間を短くした場合、脱調等が発生し、モータの動作が不安定になるおそれがある。
【0008】
本発明は、上述した課題に鑑みてなされたものであり、モータの動作の安定性を損なうことなく、モータの回転速度を上げることを目的とする。
【課題を解決するための手段】
【0009】
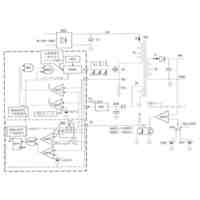
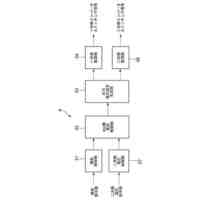
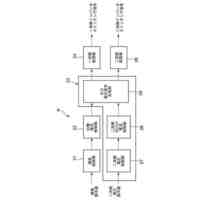
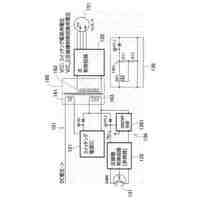
本発明の代表的な実施の形態に係るモータ駆動制御装置は、複数相のコイルを有するモータの駆動を制御するための駆動制御信号を生成する制御回路と、前記駆動制御信号に基づいて、前記コイルを駆動する駆動回路と、前記コイルの電圧を検出する電圧検出回路と、を備え、前記制御回路は、前記電圧検出回路によって検出された電圧に基づいて、非通電相の前記コイルに発生した逆起電圧のゼロクロスを検出するゼロクロス検出部と、前記コイルの転流時の遅延時間を設定する遅延時間設定部と、前記ゼロクロス検出部によって前記ゼロクロスが検出されてから前記遅延時間の経過後に前記コイルの転流を行うように前記駆動制御信号を生成する駆動制御信号生成部と、前記モータの動作状態を監視する動作状態監視部と、を有し、前記遅延時間設定部は、前記遅延時間を基準値に設定し、前記動作状態監視部による監視結果に基づいて前記動作状態が所定条件を満足したことを検出した場合に、前記遅延時間を前記基準値より短くすることを特徴とする。
【発明の効果】
【0010】
本発明に係るモータ駆動制御装置によれば、モータの動作の安定性を損なうことなく、モータの回転速度を上げることが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
充電制御システム
10日前
ニデック株式会社
モータ
24日前
個人
発電装置
18日前
株式会社ナユタ
電源装置
10日前
個人
電流制御形AC-DC電源
17日前
キヤノン株式会社
電源装置
18日前
個人
ステッピングモータ実習装置
1か月前
スズキ株式会社
移動システム
10日前
トヨタ自動車株式会社
充電方法
1か月前
トヨタ自動車株式会社
駆動装置
20日前
カヤバ株式会社
モータ制御装置
13日前
カヤバ株式会社
モータ制御装置
13日前
サンデン株式会社
電力変換装置
25日前
サンデン株式会社
電力変換装置
25日前
株式会社ダイヘン
給電装置
11日前
個人
回転力発生装置
16日前
富士電機株式会社
整流装置
3日前
ダイハツ工業株式会社
グロメット
9日前
ダイハツ工業株式会社
充電システム
19日前
新電元工業株式会社
充電装置
1か月前
日産自動車株式会社
回転電機
20日前
トヨタ自動車株式会社
電池システム
23日前
ミツミ電機株式会社
電源回路
19日前
株式会社デンソー
携帯機
9日前
富士電機株式会社
電力変換装置
13日前
シャープ株式会社
冷蔵庫
25日前
ミネベアミツミ株式会社
回転機器
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社日立製作所
回転電機
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
トヨタ自動車株式会社
電力管理システム
23日前
株式会社豊田自動織機
電動圧縮機
23日前
個人
延線補助具
16日前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社アイシン
駆動装置
9日前
住友電装株式会社
ワイヤハーネス
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ