TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025118089
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013192
出願日
2024-01-31
発明の名称
モータ駆動制御装置、モータユニット、およびモータ駆動制御方法
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
H02P
6/08 20160101AFI20250805BHJP(電力の発電,変換,配電)
要約
【課題】モータの速度制御において、モータの回転速度の安定性および応答性の両方を向上させる。
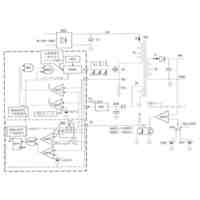
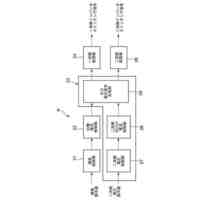
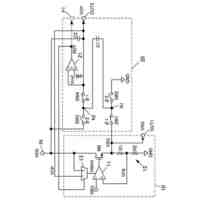
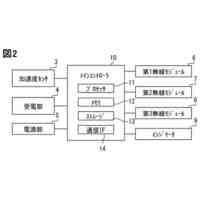
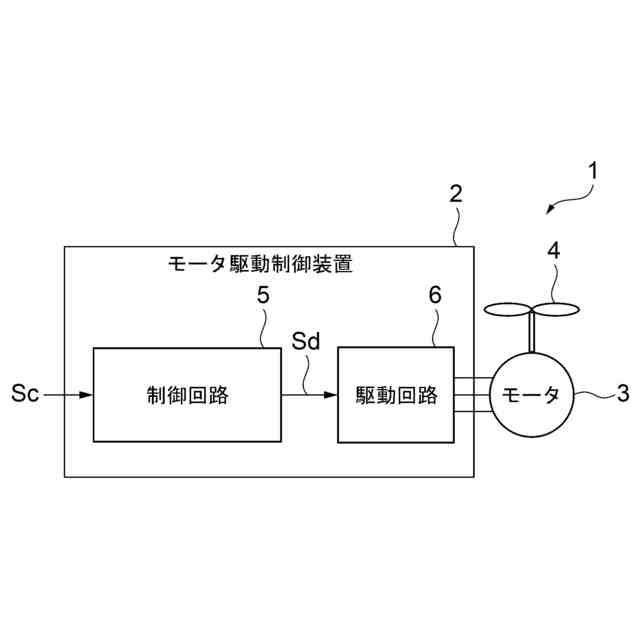
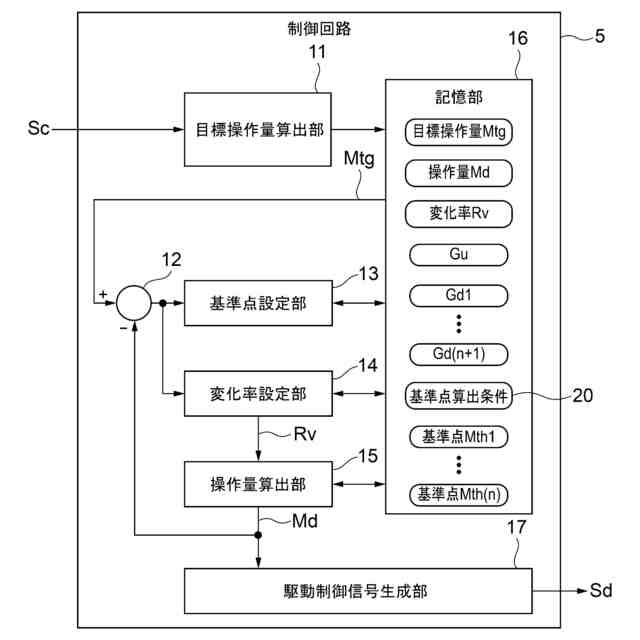
【解決手段】モータ駆動制御装置2は、駆動制御信号Sdに基づいてモータ3を駆動する駆動回路6と、目標回転速度を指定する駆動指令信号Scに基づいて、モータ3が目標回転速度で回転するようにモータ3の操作量Mdを算出するとともに、操作量Mdに応じた駆動制御信号Sdを生成して出力する制御回路5とを有する。制御回路5は、目標回転速度の変更によりモータ3を減速させる場合に、操作量の変化率Rvを、操作量Mdが目標回転速度に対応する目標操作量Mtgに近づくほど小さくなるように設定し、制御回路5は、目標回転速度の変更によりモータ3を減速させる場合に、操作量Mdが変更後の目標操作量Mtgに一致するように、変化率Rvにしたがって操作量Mdを変化させる。
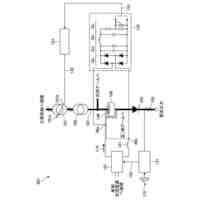
【選択図】図2
特許請求の範囲
【請求項1】
モータの駆動を制御するための駆動制御信号に基づいて前記モータを駆動する駆動回路と、
前記モータの目標回転速度を指定する駆動指令信号に基づいて、前記モータが前記目標回転速度で回転するように前記モータの操作量を算出するとともに、前記操作量に応じた前記駆動制御信号を生成して出力する制御回路と、を有し、
前記制御回路は、前記目標回転速度の変更により前記モータを減速させる場合に、前記操作量の変化率を、前記操作量が前記目標回転速度に対応する目標操作量に近づくほど小さくなるように設定し、
前記制御回路は、前記目標回転速度の変更により前記モータを減速させる場合に、前記操作量が変更後の前記目標操作量に一致するように、前記変化率にしたがって前記操作量を変化させる
モータ駆動制御装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載のモータ駆動制御装置において、
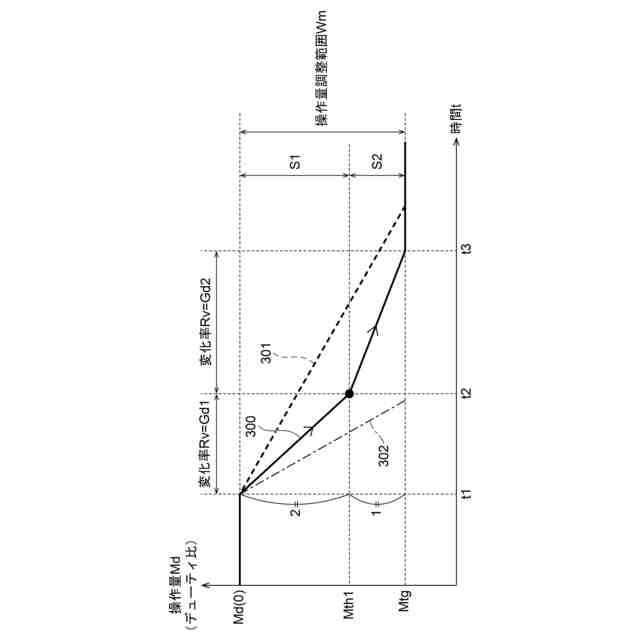
前記制御回路は、前記目標回転速度の変更により前記モータを減速させる場合に、前記目標操作量が変更される前の前記操作量から変更後の前記目標操作量までの範囲である操作量調整範囲を複数の区間に分け、前記目標操作量に近い前記区間ほど前記変化率が小さくなるように、前記区間毎に互いに異なる前記変化率を割り当てる
モータ駆動制御装置。
【請求項3】
請求項2に記載のモータ駆動制御装置において、
前記制御回路は、前記操作量調整範囲を等分することにより、前記操作量調整範囲を前記複数の区間に分ける
モータ駆動制御装置。
【請求項4】
請求項2に記載のモータ駆動制御装置において、
前記制御回路は、前記操作量調整範囲を互いに異なる割合で分けることにより、前記操作量調整範囲を前記複数の区間に分ける
モータ駆動制御装置。
【請求項5】
請求項2に記載のモータ駆動制御装置において、
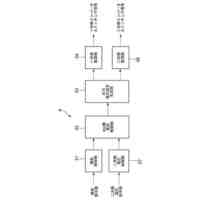
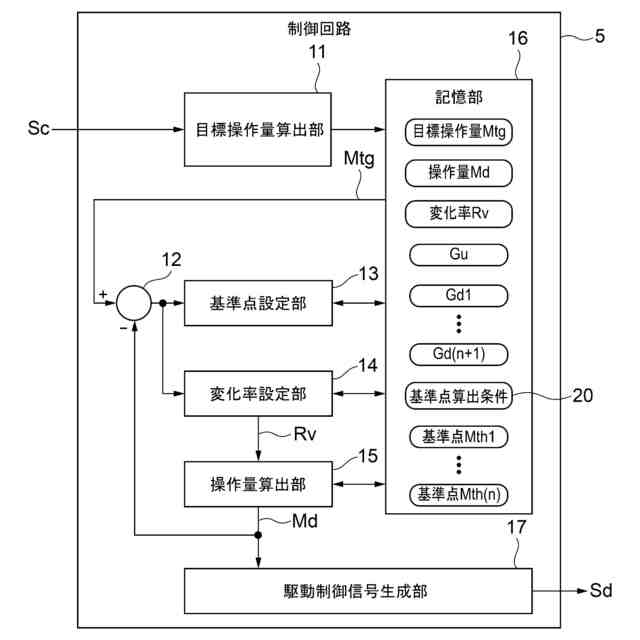
前記制御回路は、
前記駆動指令信号に基づいて前記目標操作量を算出する目標操作量算出部と、
前記目標操作量に到達するように前記操作量を前記変化率にしたがって変化させることにより、前記操作量を算出する操作量算出部と、
前記操作量に応じたデューティ比を有するPWM信号を生成し、前記駆動制御信号として出力する駆動制御信号生成部と、
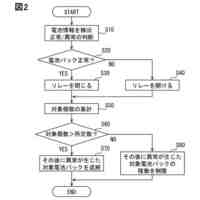
前記目標操作量が変更された場合に、前記目標操作量と前記操作量との差に基づいて、前記モータを減速させるか否かを判定する減速判定部と、
前記減速判定部により前記モータを減速させると判定された場合に、前記操作量調整範囲内に基準点を設定する基準点設定部と、
前記変化率として設定可能な互いに異なる複数の値を含む変化率情報を記憶する記憶部と、
前記操作量調整範囲を前記基準点を境にして複数の前記区間に分け、前記区間毎に前記変化率を設定する変化率設定部と、を有し、
前記変化率設定部は、前記変化率情報に基づいて、前記目標操作量に近い前記区間ほど前記変化率が小さくなるように、前記区間毎に前記変化率を設定し、
前記操作量算出部は、直前の前記操作量が属する前記区間を特定し、特定した前記区間に設定された前記変化率に基づいて、前記操作量を前記目標操作量まで変化させる
モータ駆動制御装置。
【請求項6】
請求項5に記載のモータ駆動制御装置において、
前記記憶部は、前記操作量調整範囲を分割する割合を指定する基準点算出条件を記憶し、
前記基準点設定部は、前記基準点算出条件で指定された割合で前記操作量調整範囲を分割する点を前記基準点として設定する
モータ駆動制御装置。
【請求項7】
請求項1乃至6の何れか一項に記載のモータ駆動制御装置と、
前記モータと、を備える
モータユニット。
【請求項8】
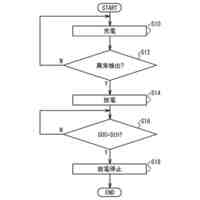
モータが目標回転速度で回転するように前記モータの操作量を算出する第1ステップと、
前記第1ステップによって算出された前記操作量に応じた駆動制御信号を生成して前記モータを駆動する第2ステップと、を有し、
前記第1ステップは、
前記目標回転速度の変更により前記モータを減速させる場合に、前記操作量の変化率を、前記操作量が前記目標回転速度に対応する目標操作量に近づくほど小さくなるように設定する第3ステップと、
前記目標回転速度の変更により前記モータを減速させる場合に、前記操作量が変更後の前記目標操作量に一致するように、前記変化率に基づいて前記操作量を変化させる第4ステップと、を含む
モータ駆動制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ駆動制御装置、モータユニット、およびモータ駆動制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
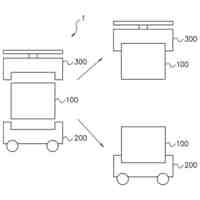
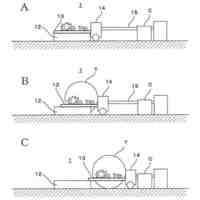
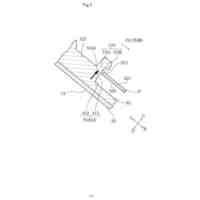
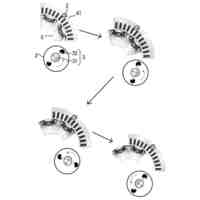
一般にモータの制御方法として、モータが目標回転速度で回転するように制御する速度制御が知られている(例えば、特許文献1参照)。速度制御では、より短時間にモータの回転速度が目標回転速度に到達することが望ましい。例えば、ドローン等の飛行装置において回転翼(プロペラ)の駆動源としてモータを用いる場合、飛行装置の機体を急旋回させる際に目標回転速度を変更して、モータの回転速度を目標回転速度に速やかに到達させる必要がある。
【先行技術文献】
【特許文献】
【0003】
特許第2846332号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本願発明者は、ドローン等の飛行装置においてプロペラを回転させるためのモータの駆動制御方法に関し、以下に示す課題があることを見出した。
【0005】
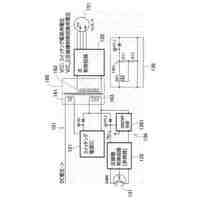
飛行装置用のモータの駆動制御を行うためのモータ駆動制御装置は、目標回転速度に応じた操作量を算出し、その操作量に対応するデューティ比のPWM信号(駆動制御信号)を生成してインバータ回路を駆動することにより、モータ(ロータ)が目標回転速度で回転するようにモータを制御する。ここで、モータの操作量とは、インバータ回路を駆動させるためのPWM信号(駆動制御信号)のデューティ比であり、モータに供給すべき電力(電流)の大きさに相当する値である。デューティ比を変化させることにより、モータ(ロータ)が目標回転速度で回転するようにモータを制御する。
【0006】
例えば、飛行装置の機体を減速させる場合に、モータ駆動制御装置は、操作量を目標回転速度に対応する目標操作量まで所定の変化率で低下させることにより、駆動制御信号のデューティ比を低下させる。これにより、モータの回転速度が低下し、飛行装置を減速させることができる。
【0007】
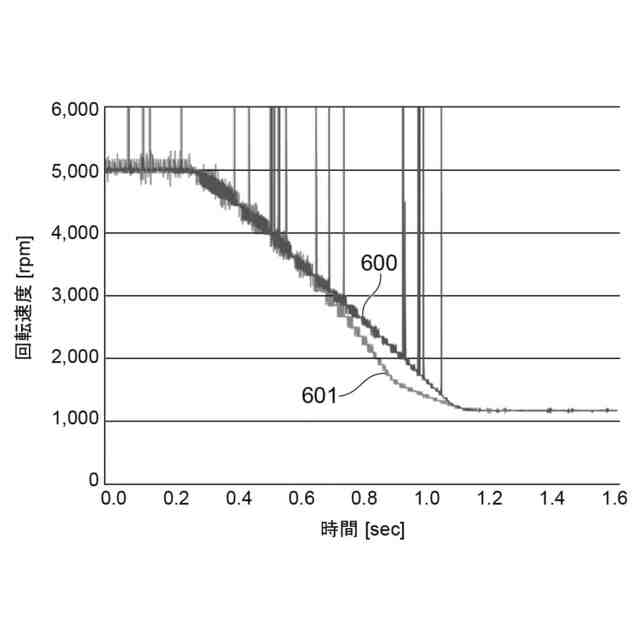
しかしながら、減速時にはモータに連結されているプロペラの遠心力により、モータの負荷が大きくなるため、駆動制御信号のデューティ比の変化に対してモータの回転速度の変化が緩やかになる。その結果、モータの回転速度が目標回転速度に到達するまでに要する時間が長くなる。すなわち、減速時にはモータの速度応答性が低下する。
【0008】
そこで、本願発明者は、飛行装置の減速時におけるモータの操作量(駆動制御信号のデューティ比)の変化率を大きくして、モータの速度応答性を上げることを検討した。
【0009】
しかしながら、モータの減速時における操作量の変化率を大きくした場合、駆動制御信号のデューティ比が、その時のモータの回転速度に適した値より低い値に設定されることにより、モータに大きな逆起電力が発生し、モータを駆動するインバータ回路に接続された電源ラインの電圧(電源電圧)が上昇するという課題がある。
【0010】
図7は、本発明者による先行検討例に係るモータ駆動制御方法によってモータを駆動したときの、モータの減速時の電源電圧の時間変化を示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
充電制御システム
9日前
ニデック株式会社
モータ
23日前
個人
発電装置
17日前
株式会社ナユタ
電源装置
9日前
個人
電流制御形AC-DC電源
16日前
キヤノン株式会社
電源装置
17日前
個人
ステッピングモータ実習装置
1か月前
スズキ株式会社
移動システム
9日前
トヨタ自動車株式会社
駆動装置
19日前
サンデン株式会社
電力変換装置
24日前
サンデン株式会社
電力変換装置
24日前
カヤバ株式会社
モータ制御装置
12日前
カヤバ株式会社
モータ制御装置
12日前
富士電機株式会社
整流装置
2日前
個人
回転力発生装置
15日前
株式会社ダイヘン
給電装置
10日前
ダイハツ工業株式会社
グロメット
8日前
ミツミ電機株式会社
電源回路
18日前
トヨタ自動車株式会社
電池システム
22日前
日産自動車株式会社
回転電機
19日前
ダイハツ工業株式会社
充電システム
18日前
シャープ株式会社
冷蔵庫
24日前
富士電機株式会社
電力変換装置
12日前
株式会社デンソー
携帯機
8日前
株式会社日立製作所
回転電機
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社アイシン
駆動装置
8日前
個人
延線補助具
15日前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社豊田自動織機
電動圧縮機
22日前
住友電装株式会社
ワイヤハーネス
4日前
ミネベアミツミ株式会社
回転機器
1か月前
トヨタ自動車株式会社
電力管理システム
22日前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社デンソー
電源装置
25日前
三浦工業株式会社
電力供給システム
18日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ