TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120788
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015883
出願日
2024-02-05
発明の名称
駆動装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
H02P
21/22 20160101AFI20250808BHJP(電力の発電,変換,配電)
要約
【課題】d軸検出電流やq軸検出電流をより適切に補正する。
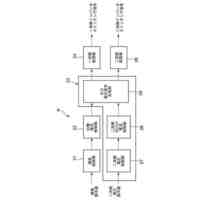
【解決手段】駆動装置は、モータのトルク指令および永久磁石の磁石温度に基づくd軸推定電圧とd軸検出電流に基づくd軸検出電圧とのd軸電圧誤差、または、トルク指令および磁石温度に基づくq軸推定磁束とq軸検出電流に基づくq軸検出磁束とのq軸磁束誤差、が値0となるようにd軸検出電流およびq軸検出電流を補正して補正後d軸電流および補正後q軸電流を演算し、補正後d軸電流および補正後q軸電流とd軸電流指令およびq軸電流指令との差分が打ち消されるようにインバータを制御する。
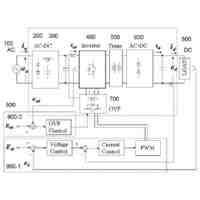
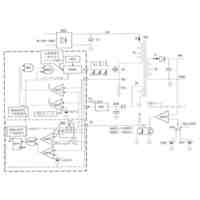
【選択図】図3
特許請求の範囲
【請求項1】
回転子コアに永久磁石が埋め込まれた回転子と固定子コアに三相コイルが巻回された固定子とを有するモータと、前記モータを駆動するインバータと、前記モータの各相の相電流を検出する電流センサと、前記電流センサの検出値に基づくd軸検出電流およびq軸検出電流と前記モータのトルク指令に基づくd軸電流指令およびq軸電流指令とに基づいて前記インバータを制御する制御装置と、を備える駆動装置であって、
前記制御装置は、前記トルク指令および前記永久磁石の磁石温度に基づくd軸推定電圧と前記d軸検出電流に基づくd軸検出電圧とのd軸電圧誤差、または、前記トルク指令および前記磁石温度に基づくq軸推定磁束と前記q軸検出電流に基づくq軸検出磁束とのq軸磁束誤差、が値0となるように前記d軸検出電流および前記q軸検出電流を補正して補正後d軸電流および補正後q軸電流を演算し、前記補正後d軸電流および前記補正後q軸電流と前記d軸電流指令および前記q軸電流指令との差分が打ち消されるように前記インバータを制御する、
駆動装置。
続きを表示(約 290 文字)
【請求項2】
請求項1記載の駆動装置であって、
前記制御装置は、前記d軸電圧誤差または前記q軸電圧誤差が値0となるように、前記d軸検出電流および前記q軸検出電流と係数とに基づく誤差特性を演算し、前記d軸検出電流および前記q軸検出電流に対して前記誤差特性を用いた補正を行なって前記補正後d軸電流および前記補正後q軸電流を演算する、
駆動装置。
【請求項3】
請求項1または2記載の駆動装置において、
前記制御装置は、前記d軸補正後電流および前記q軸補正後電流に基づいてd軸補正後磁束およびq軸補正後磁束を演算する、
駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、駆動装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、モータと、モータを駆動するインバータと、を備えるインバータとを備える駆動装置において、永久磁石の温度を磁束テーブルに適用して温度に対応する磁束を求め、求めた磁束およびトルク指令に基づくトルク電流指令(q軸電流指令)および磁化電流指令(d軸電流指令)と、トルク電流(q軸検出電流)および磁化電流(d軸検出電流)と、の差分が打ち消されるようにトルク電圧指令(q軸電圧指令)および磁化電圧指令(d軸電圧指令)を求めてインバータを制御するものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平9-51700号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
こうした駆動装置では、モータの各相の相電流を検出する電流センサの検出値にセンサ誤差が含まれる場合、d軸検出電流やq軸検出電流が実際の値に対してずれ、d軸検出電流やq軸検出電流に基づくd軸検出磁束やq軸検出磁束が実際の値に対してずれ、モータの制御に影響を与える場合がある。このため、d軸検出電流やq軸検出電流をより適切に補正することが課題の一つとされている。
【0005】
本開示の駆動装置は、d軸検出電流やq軸検出電流をより適切に補正することを主目的とする。
【課題を解決するための手段】
【0006】
本開示の駆動装置は、上述の主目的を達成するために以下の手段を採った。本開示の駆動装置は、回転子コアに永久磁石が埋め込まれた回転子と固定子コアに三相コイルが巻回された固定子とを有するモータと、前記モータを駆動するインバータと、前記モータの各相の相電流を検出する電流センサと、前記電流センサの検出値に基づくd軸検出電流およびq軸検出電流と前記モータのトルク指令に基づくd軸電流指令およびq軸電流指令とに基づいて前記インバータを制御する制御装置と、を備える駆動装置であって、前記制御装置は、前記トルク指令および前記永久磁石の磁石温度に基づくd軸推定電圧と前記d軸検出電流に基づくd軸検出電圧とのd軸電圧誤差、または、前記トルク指令および前記磁石温度に基づくq軸推定磁束と前記q軸検出電流に基づくq軸検出磁束とのq軸磁束誤差、が値0となるように前記d軸検出電流および前記q軸検出電流を補正して補正後d軸電流および補正後q軸電流を演算し、前記補正後d軸電流および前記補正後q軸電流と前記d軸電流指令および前記q軸電流指令との差分が打ち消されるように前記インバータを制御することを要旨とする。
【0007】
本開示の駆動装置では、トルク指令および永久磁石の磁石温度に基づくd軸推定電圧とd軸検出電流に基づくd軸検出電圧とのd軸電圧誤差、または、トルク指令および磁石温度に基づくq軸推定磁束とq軸検出電流に基づくq軸検出磁束とのq軸磁束誤差、が値0となるようにd軸検出電流およびq軸検出電流を補正して補正後d軸電流および補正後q軸電流を演算し、補正後d軸電流および補正後q軸電流とd軸電流指令およびq軸電流指令との差分が打ち消されるようにインバータを制御する。このようにして、d軸検出電流やq軸検出電流をより適切に補正することができる。発明者らは、鋭意研究により、これらのことを確認した。
【0008】
本開示の駆動装置において、前記制御装置は、前記d軸電圧誤差または前記q軸電圧誤差が値0となるように、前記d軸検出電流および前記q軸検出電流と係数とに基づく誤差特性を演算し、前記d軸検出電流および前記q軸検出電流に対して前記誤差特性を用いた補正を行なって前記補正後d軸電流および前記補正後q軸電流を演算してもよい。こうすれば、d軸検出電流およびq軸検出電流と係数とに基づく誤差特性を用いて、d軸検出電流やq軸検出電流をより適切に補正することができる。
【0009】
本開示の駆動装置において、前記d軸補正後電流および前記q軸補正後電流に基づいてd軸補正後磁束およびq軸補正後磁束を演算してもよい。
【図面の簡単な説明】
【0010】
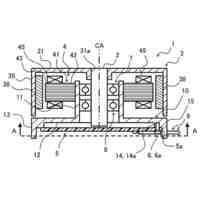
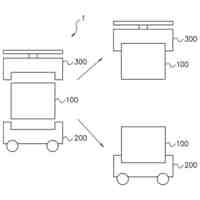
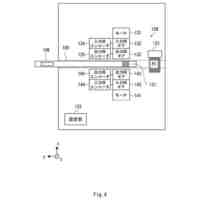
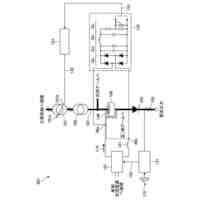
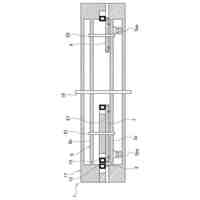
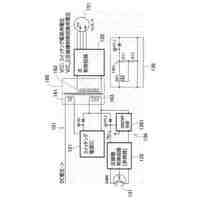
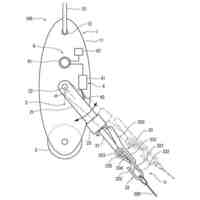
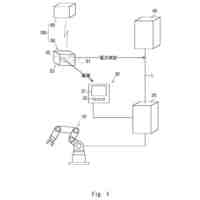
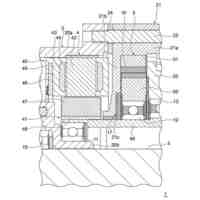
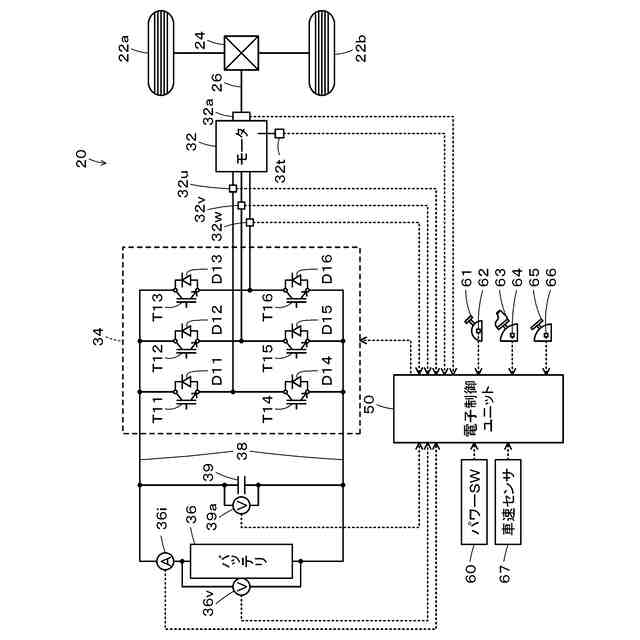
本開示の実施形態の駆動装置を備える電気自動車の概略構成図である。
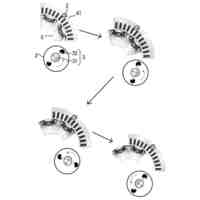
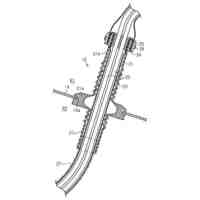
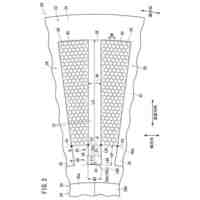
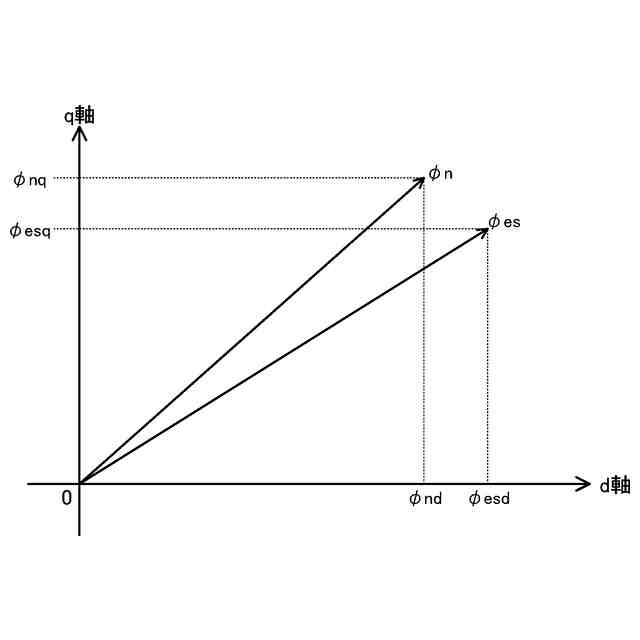
d軸検出電流およびq軸検出電流に電流センサのセンサ誤差が含まれる場合の磁束の様子の一例を示す説明図である。
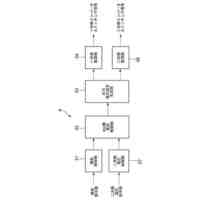
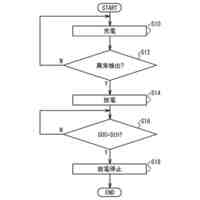
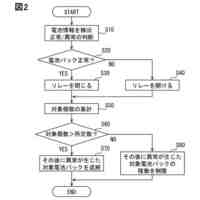
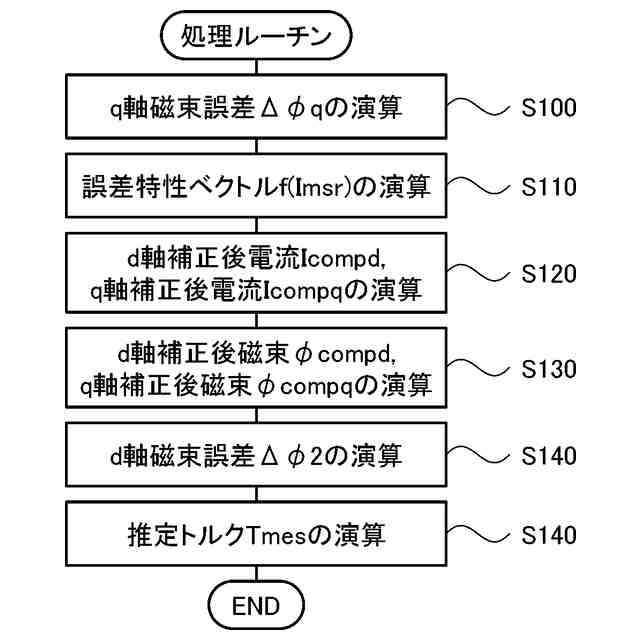
処理ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
充電制御システム
11日前
ニデック株式会社
モータ
25日前
個人
発電装置
19日前
個人
電流制御形AC-DC電源
18日前
株式会社ナユタ
電源装置
11日前
個人
ステッピングモータ実習装置
1か月前
キヤノン株式会社
電源装置
19日前
スズキ株式会社
移動システム
11日前
トヨタ自動車株式会社
駆動装置
21日前
カヤバ株式会社
モータ制御装置
14日前
カヤバ株式会社
モータ制御装置
14日前
サンデン株式会社
電力変換装置
26日前
サンデン株式会社
電力変換装置
26日前
富士電機株式会社
整流装置
4日前
株式会社ダイヘン
給電装置
12日前
ダイハツ工業株式会社
グロメット
10日前
個人
回転力発生装置
17日前
日産自動車株式会社
回転電機
21日前
ダイハツ工業株式会社
充電システム
20日前
トヨタ自動車株式会社
電池システム
24日前
ミツミ電機株式会社
電源回路
20日前
株式会社デンソー
携帯機
10日前
シャープ株式会社
冷蔵庫
26日前
富士電機株式会社
電力変換装置
14日前
ミネベアミツミ株式会社
回転機器
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
個人
延線補助具
17日前
住友電装株式会社
ワイヤハーネス
6日前
株式会社デンソー
電源装置
27日前
株式会社日立製作所
回転電機
1か月前
株式会社豊田自動織機
電動圧縮機
24日前
トヨタ自動車株式会社
電力管理システム
24日前
株式会社アイシン
駆動装置
10日前
ミネベアミツミ株式会社
回転機器
1か月前
本田技研工業株式会社
回転電機
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ