TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129534
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026228
出願日
2024-02-26
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20250829BHJP(鉄道以外の路面車両)
要約
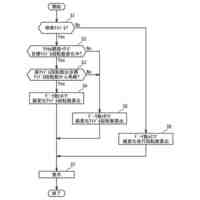
【課題】車線変更のための運転操作が開始された時点で車線維持機能を無効化し、その後に、適切なタイミングにて、当該機能を再び有効化することができる運転支援装置を提供する。
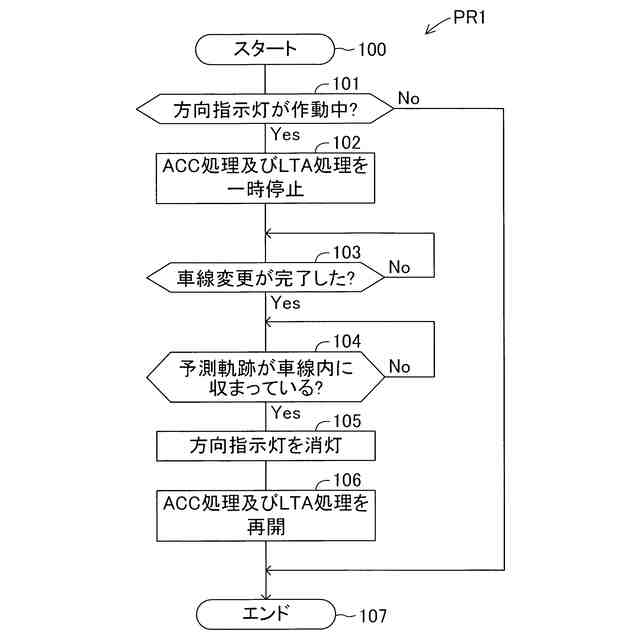
【解決手段】運転支援装置は、自車両が車線に沿って進行するように自車両を制御する車線維持処理を実行可能に構成されたプロセッサと、を備える。前記プロセッサは、自車両が第一車線を走行している状況下で自車両の方向指示灯が作動し始めたことをトリガとして前記車線維持処理の実行を制限し、その後、前記第一車線に隣接する第二車線への車線変更が完了したと判定した場合であって、且つ、自車両が前記第二車線に沿って進行するように自車両を制御可能であると判定するための所定の解除条件が成立した場合に、前記方向指示灯の作動を停止させるとともに前記車線維持処理の実行の制限を解除する。
【選択図】図3
特許請求の範囲
【請求項1】
自車両が走行している車線に対する自車両の位置及び姿勢を取得するためのセンサ、及び自車両の車速を取得するためのセンサを含む車載センサと、
自車両が前記車線に沿って進行するように自車両を制御する車線維持処理を実行可能に構成されたプロセッサと、
を備えた運転支援装置であって、
前記プロセッサは、自車両が第一車線を走行している状況下で自車両の方向指示灯が作動し始めた場合に前記車線維持処理の実行を制限し、その後、前記第一車線に隣接する第二車線への車線変更が完了したと判定した場合であって、且つ、自車両が前記第二車線に沿って進行するように自車両を制御可能であると判定するための所定の解除条件が成立した場合に、前記方向指示灯の作動を停止させるとともに前記車線維持処理の実行の制限を解除する、
ように構成された、運転支援装置。
続きを表示(約 730 文字)
【請求項2】
請求項1に記載の運転支援装置において、
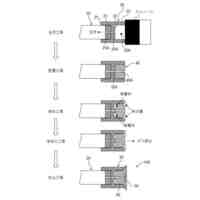
前記プロセッサは、前記車載センサから取得した情報に基づいて、自車両の全輪が前記第二車線に進入したことを検知した場合に、前記第一車線から前記第二車線への車線変更が完了したと判定する、ように構成された、運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
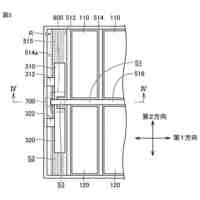
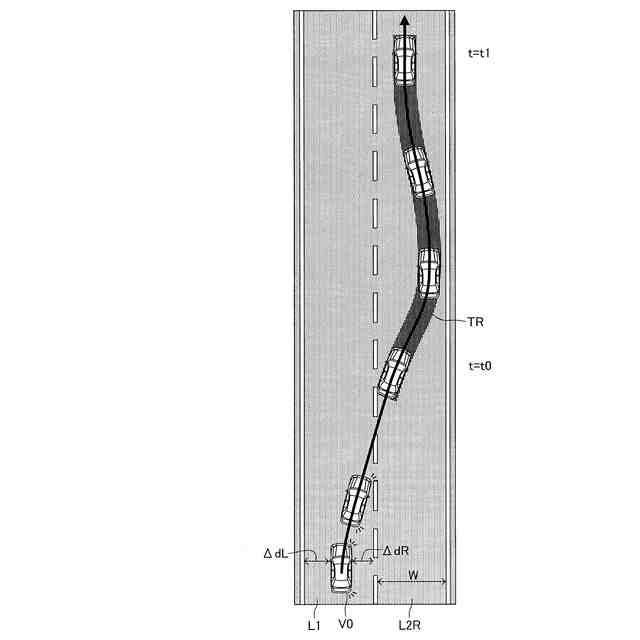
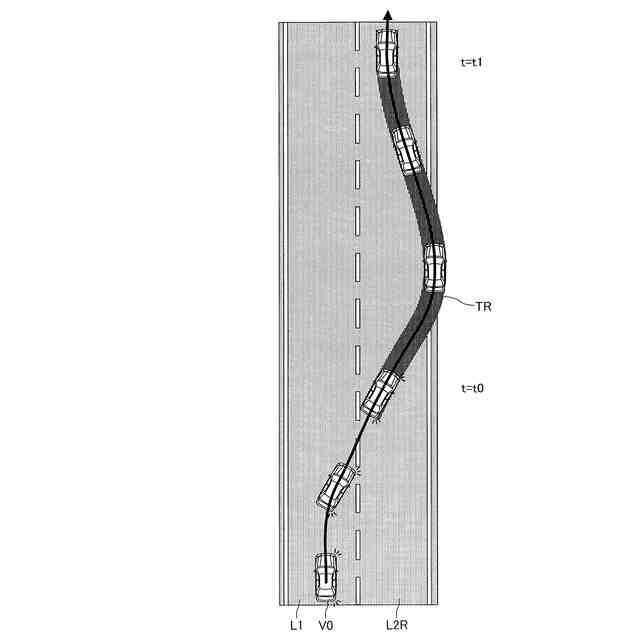
前記プロセッサは、前記車線変更が完了したと判定した場合に、現時点から前記車線維持処理を再開したと仮定し、当該車線維持処理の実行により前記第二車線に対する自車両の位置及び姿勢に関する所定の条件が成立するまでに自車両が通過すると予測される領域である予測軌跡(TR)を演算し、当該予測軌跡が前記第二車線内に収まっている場合に、前記解除条件が成立したと判定する、ように構成された、運転支援装置。
【請求項4】
請求項1乃至請求項3のうちのいずれか1つに記載の運転支援装置において、
前記プロセッサは、自車両が前記第一車線を走行中に前記方向指示灯が作動し始めたことを検知した後、前記第一車線から前記第二車線への車線変更が完了したと判定する以前の期間において、前記第二車線での前記車線維持処理の実行が困難であると判定するためのキャンセル条件が成立している場合に、前記方向指示灯の作動を停止させる、ように構成された運転支援装置。
【請求項5】
請求項4に記載の運転支援装置において、
前記プロセッサは、前記第二車線の幅が閾値以下である場合、又は、前記第二車線に障害物が存在している場合に、前記キャンセル条件が成立したと判定する、ように構成された、運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両が車線に沿って進行するように自車両のステアリング装置を制御する運転支援装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
自車両が車線に沿って進行するように自車両のステアリング装置を制御する運転支援装置が提案されている(例えば、下記特許文献1を参照。)。特許文献1の運転支援装置(以下、「従来装置」と称呼する。)は、自車両の前景を撮影して得られた画像(前景画像)を解析して、車線(走行レーン)の幅方向における中央部付近に自車両が位置するように、自車両のステアリング装置を制御する(車線維持機能)。従来装置は、現時点で自車両が位置している第一車線から、当該第一車線に隣接する第二車線へ自車両を移動させる運転操作(車線変更)を運転者が実行している期間において、車線維持機能を無効化する。具体的には、従来装置は、自車両の方向指示灯が作動(点滅)し始めたことを検知した場合に、車線維持機能を無効化する。従来装置は、車線維持機能を無効化した後、前景画像に基づいて、自車両と区画線(第一車線と第二車線との境界線)との位置関係に関する所定条件が成立したと判定した場合(自車両が区画線を跨いだと判定した場合)、車線維持機能を有効化する。
【先行技術文献】
【特許文献】
【0003】
特開2022-77931号公報
【発明の概要】
【0004】
ところで、一般に、車線維持機能によりステアリング装置が自動制御される場合、乗員の不快感を抑制するために、自車両の幅方向の加速度(横方向加速度)の上限値(舵角の上限値)が規定されている。ここで、例えば、第一車線から第二車線への車線変更において当該第二車線への自車両の進入角度が比較的大きい場合、車線維持機能による自動操舵が実行されたとしても、自車両の横方向加速度(舵角)の上限値が規定されているため(自車両の旋回半径をあまり小さくできないため)、第二車線に沿って自車両が進行するように第二車線に対する自車両の位置及び姿勢を修正する過程で、自車両が第二車線の端部(第一車線とは反対側の端部)から逸脱してしまう虞がある。また、従来装置は、区画線と自車両との位置関係に関する所定条件が成立した場合に車線維持機能を有効化するが、運転者は、車線維持機能が有効化されたタイミングを認識し難い。
【0005】
本発明の目的の1つは、車線変更のための運転操作が開始された時点で車線維持機能を無効化し、その後に、適切なタイミングにて、当該機能を再び有効化することができる運転支援装置を提供することにある。
【0006】
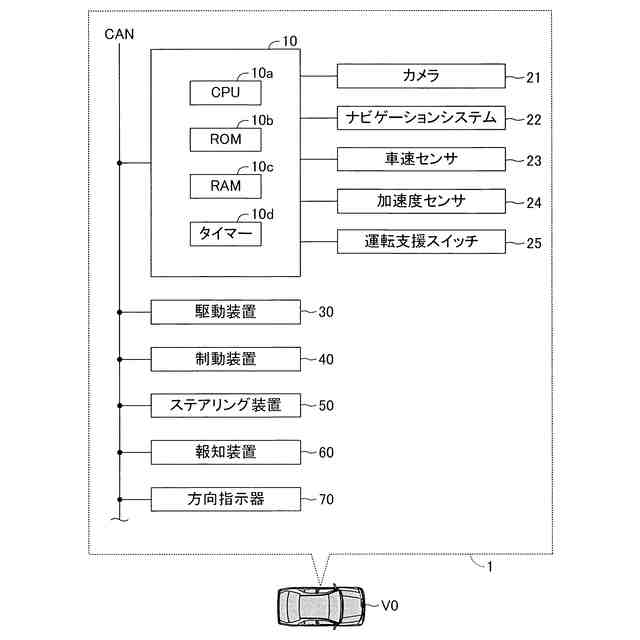
上記課題を解決するために、本発明の運転支援装置(1)は、
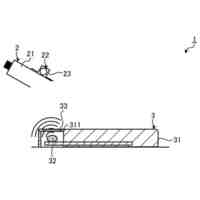
自車両が走行している車線に対する自車両の位置及び姿勢を取得するためのセンサ(21,22,23)、及び自車両の車速を取得するためのセンサ(24)を含む車載センサ(20)と、
自車両が前記車線に沿って進行するように自車両を制御する車線維持処理を実行可能に構成されたプロセッサ(10)と、
を備える。
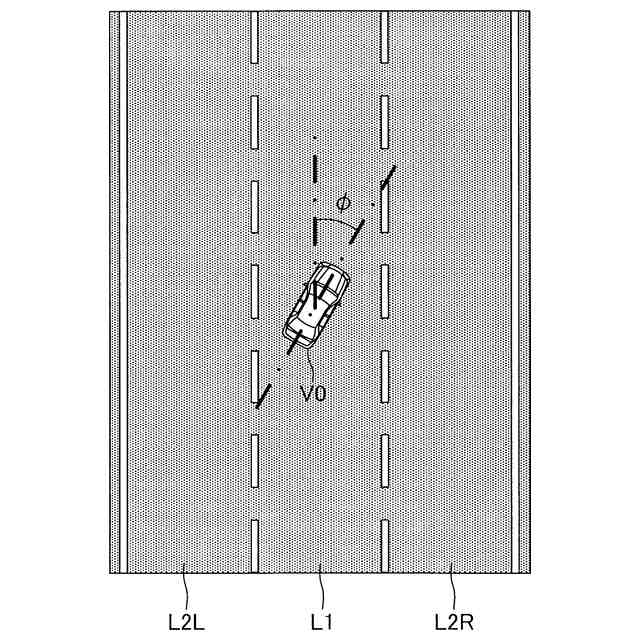
前記プロセッサは、自車両が第一車線(L1)を走行している状況下で自車両の方向指示灯が作動し始めたことをトリガとして前記車線維持処理の実行を制限し、その後、前記第一車線に隣接する第二車線(L2R,L2L)への車線変更が完了したと判定した場合であって、且つ、自車両が前記第二車線に沿って進行するように自車両を制御可能であると判定するための所定の解除条件が成立した場合に、前記方向指示灯の作動を停止させるとともに前記車線維持処理の実行の制限を解除する。
【0007】
上記従来装置のように、第一車線から第二車線への車線変更が完了した時点で車線維持処理を再開した場合に、車線維持処理が再開されたにも関わらず、その後の短期間内に自車両が第二車線から逸脱してしまう場合がある。本発明に係る運転支援装置のプロセッサは、第一車線から第二車線への車線変更が完了したと判定した場合、自車両が第二車線に沿って進行するように自車両を制御可能であると判定するための条件(解除条件)が成立している場合に、車線維持処理を再開する。これにより、第二車線において車線維持処理が再開されたにも関わらず、その後の短期間内に第二車線から逸脱してしまうことを抑制できる。すなわち、本発明によれば、車線変更が完了した後、適切なタイミングで車線維持処理が再開される。また、解除条件が成立した時点で方向指示灯の作動が自動的に停止(消灯)される。これにより、運転者は、車線維持処理が再開されたことを認識できる。すなわち、運転者は、運転操作(操舵)を運転支援装置にある程度委ねることができる状態であることを認識できる。
【0008】
本発明の一態様に係る運転支援装置において、
前記プロセッサは、前記車載センサから取得した情報に基づいて、自車両の全輪が前記第二車線に進入したことを検知した場合に、前記第一車線から前記第二車線への車線変更が完了したと判定する。
【0009】
これによれば、自車両が第一車線と第二車線とを区画する区画線を跨いでいる状態で車線維持処理(運転支援)が開始されることが抑制される。
【0010】
本発明の他の態様に係る運転支援装置において、
前記プロセッサは、前記車線変更が完了したと判定した場合に、現時点から前記車線維持処理を再開したと仮定し、当該車線維持処理の実行により前記第二車線に対する自車両の位置及び姿勢に関する所定の条件が成立するまでに自車両が通過すると予測される領域である予測軌跡(TR)を演算し、当該予測軌跡が前記第二車線内に収まっている場合に、前記解除条件が成立したと判定する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
電動車
13日前
トヨタ自動車株式会社
負極層
16日前
トヨタ自動車株式会社
駆動装置
16日前
トヨタ自動車株式会社
ステータ
6日前
トヨタ自動車株式会社
報知装置
13日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
送電装置
5日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
液系電池
6日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
充電装置
16日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
制御装置
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ