TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129637
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026406
出願日
2024-02-26
発明の名称
車両運転支援装置、車両運転支援方法及び車両運転支援プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/08 20200101AFI20250829BHJP(車両一般)
要約
【課題】運転支援制御の実行状態を変更することを要求するための操作が運転者により誤って行われた可能性を考慮して運転支援制御の実行状態の変更を行うことができる車両運転支援装置を提供する。
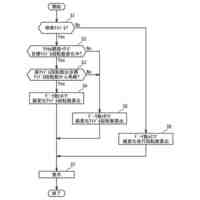
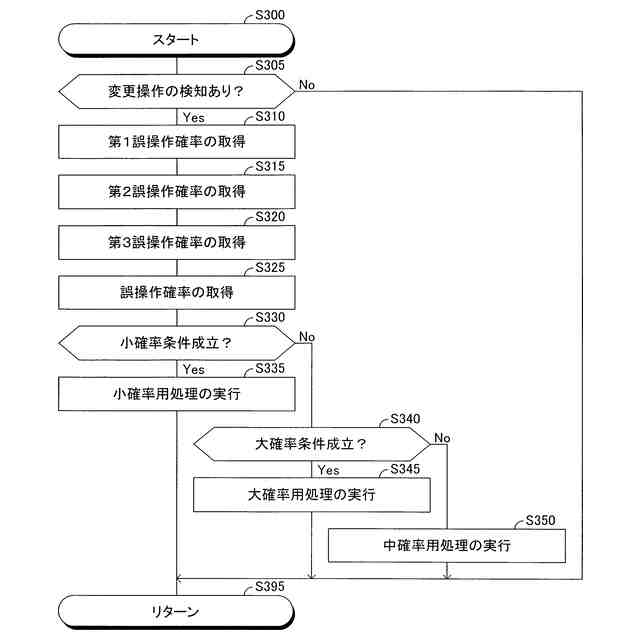
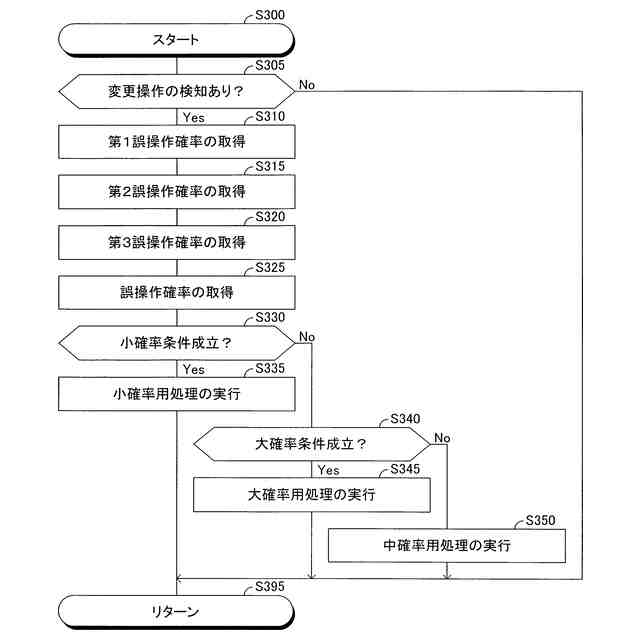
【解決手段】車両運転支援装置10は、自車両100の運転者の運転操作を支援する運転支援制御を実行する制御装置90を備える。制御装置は、運転支援制御の実行状態の変更を当該制御装置に要求するための運転者による操作である変更操作を検知したときに、運転者が変更操作を誤って行った可能性を示す誤操作確率であって当該可能性が高いほど大きくなる誤操作確率が所定誤操作確率以下である場合、変更操作による要求通りに実行状態の変更を行い、変更操作を検知したときに、誤操作確率が所定誤操作確率よりも大きい場合、実行状態の変更を行わず或いは変更操作により要求された前記実行状態の変更よりも緩やかな実行状態の変更を行う。
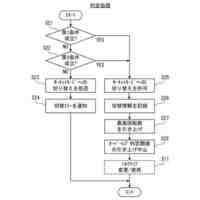
【選択図】 図3
特許請求の範囲
【請求項1】
自車両の運転者の運転操作を支援する運転支援制御を実行する制御装置を備えた車両運転支援装置において、
前記制御装置は、
前記運転支援制御の実行状態の変更を当該制御装置に要求するための前記自車両の運転者による操作である変更操作を検知したときに、前記自車両の運転者が前記変更操作を誤って行った可能性を示す誤操作確率であって前記可能性が高いほど大きくなる誤操作確率が所定誤操作確率以下である場合、前記変更操作による要求通りに前記実行状態の変更を行い、
前記変更操作を検知したときに、前記誤操作確率が前記所定誤操作確率よりも大きい場合、前記実行状態の変更を行わず或いは前記変更操作により要求された前記実行状態の変更よりも緩やかな前記実行状態の変更を行う、
ように構成されている、
車両運転支援装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
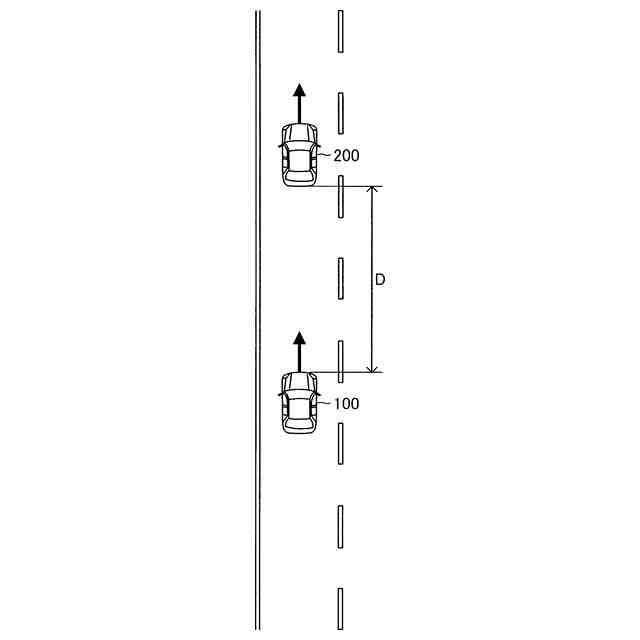
前記誤操作確率は、運転者操作頻度が大きいほど小さくなり、前記運転者操作頻度は、前記自車両が前記変更操作の検知時点で走行している走路と同種の走路において前記変更操作が前記自車両の運転者により過去に行われた頻度であり、或いは、
前記誤操作確率は、市場操作頻度が大きいほど小さくなり、前記市場操作頻度は、前記自車両が前記変更操作の検知時点で走行している走路と同種の走路において前記変更操作により要求された前記実行状態の変更と同種の変更を要求する操作が他車両の運転者により過去に行われた頻度であり、或いは、
前記誤操作確率は、推奨度合が大きいほど小さくなり、前記自車両が前記変更操作の検知時点で走行している走路において前記変更操作により要求される前記実行状態の変更が推奨される度合である、
車両運転支援装置。
【請求項3】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
前記変更操作を検知したときに前記実行状態の変更を行わない場合、前記実行状態の変更を行うことの承認を求める承認要求通知を前記自車両の運転者に対して行い、
前記自車両の運転者が前記実行状態の変更を行うことを承認した場合、前記実行状態の変更を行う、
ように構成されている、
車両運転支援装置。
【請求項4】
請求項3に記載の車両運転支援装置において、
前記誤操作確率は、運転者承認頻度が大きいほど小さくなり、
前記運転者承認頻度は、前記自車両が前記変更操作の検知時点で走行している走路と同種の走路において前記変更操作と同じ操作が過去に検知されて行われた前記承認要求通知に対して前記自車両の運転者が前記実行状態の変更を行うことを承認した頻度である、
車両運転支援装置。
【請求項5】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記変更操作により要求された前記実行状態の変更よりも緩やかな前記実行状態の変更を行う場合、前記実行状態の変更を行うことを前記自車両の運転者に対して通知するように構成されている、
車両運転支援装置。
【請求項6】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記変更操作が前記運転支援制御による前記自車両に対する制御量の変更を要求するものであって当該変更操作を検知したときに当該変更操作により要求された前記実行状態の変更よりも緩やかな前記実行状態の変更を行う場合、当該変更操作により要求された前記制御量の変更よりも小さい前記制御量の変更を行うように構成されている、
車両運転支援装置。
【請求項7】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
前記変更操作を検知したときに前記実行状態の変更を行わない場合、前記実行状態を変更することを知らせるための変更通知を前記自車両の運転者に対して行い、
前記変更通知を行ってから所定時間が経過したときに前記実行状態の変更を行う、
ように構成されている、
車両運転支援装置。
【請求項8】
自車両の運転者の運転操作を支援する運転支援制御を実行する車両運転支援方法において、
前記運転支援制御の実行状態の変更を要求するための前記自車両の運転者による操作である変更操作を検知したときに、前記自車両の運転者が前記変更操作を誤って行った可能性を示す誤操作確率であって前記可能性が高いほど大きくなる誤操作確率が所定誤操作確率以下である場合、前記変更操作による要求通りに前記実行状態の変更を行う工程と、
前記変更操作を検知したときに、前記誤操作確率が前記所定誤操作確率よりも大きい場合、前記実行状態の変更を行わず或いは前記変更操作により要求された前記実行状態の変更よりも緩やかな前記実行状態の変更を行う工程と、
を具備する車両運転支援方法。
【請求項9】
自車両の運転者の運転操作を支援する運転支援制御を実行する車両運転支援プログラムにおいて、
前記運転支援制御の実行状態の変更を要求するための前記自車両の運転者による操作である変更操作を検知したときに、前記自車両の運転者が前記変更操作を誤って行った可能性を示す誤操作確率であって前記可能性が高いほど大きくなる誤操作確率が所定誤操作確率以下である場合、前記変更操作による要求通りに前記実行状態の変更を行い、
前記変更操作を検知したときに、前記誤操作確率が前記所定誤操作確率よりも大きい場合、前記実行状態の変更を行わず或いは前記変更操作により要求された前記実行状態の変更よりも緩やかな前記実行状態の変更を行う、
ように構成された車両運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置、車両運転支援方法及び車両運転支援プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
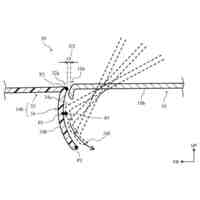
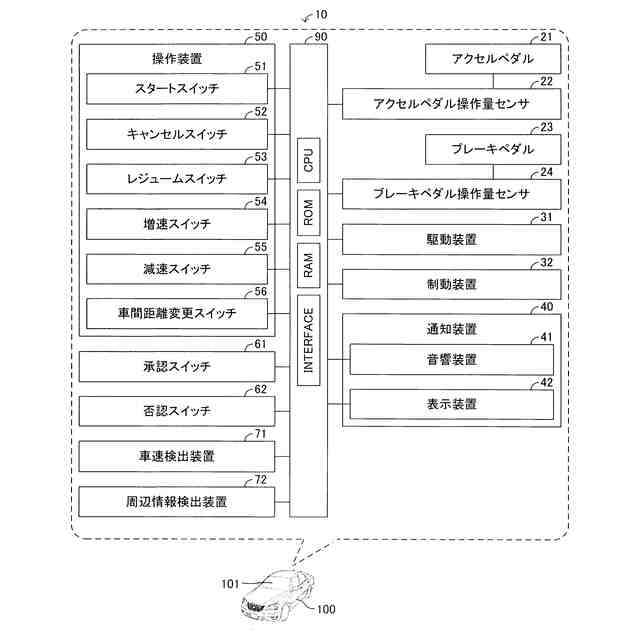
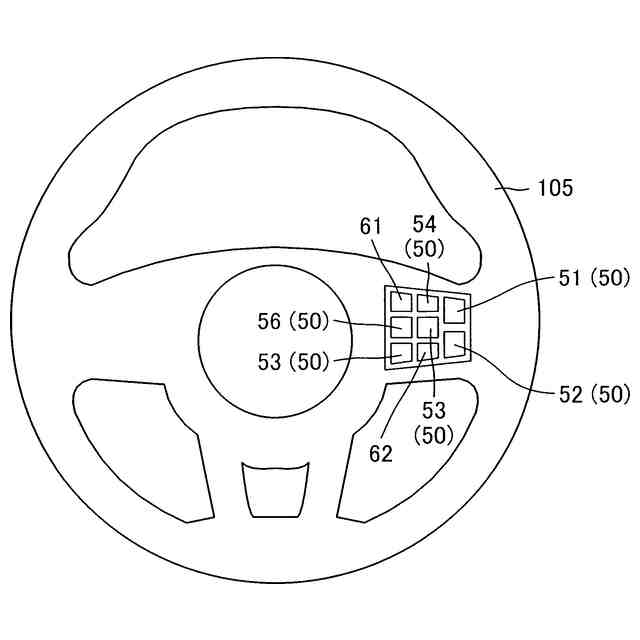
車両の運転者の運転操作を支援する運転支援制御を実行する車両運転支援装置が知られている。こうした車両運転支援装置においては、運転支援制御の開始や停止などを行うために運転者が操作する各種スイッチが車両のハンドルに設けられていることが多い。このように各種スイッチがハンドルに設けられていると、運転者がそれらスイッチを操作しやすい反面、運転者が誤ってスイッチを操作してしまう可能性がある。そこで、例えば、運転支援制御を開始させるためのスイッチが操作された場合、車両が走行している走路がどのような走路であるかに基づいて、運転支援制御を開始させることが許容されるか否かを判断するように構成された車両運転支援装置も知られている(例えば、特許文献1参照)。この従来の車両運転支援装置は、運転支援制御を開始させることが許容されない場合、運転支援制御を開始しないようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2009-143354号公報
【発明の概要】
【0004】
従来の車両運転支援装置は、車両が走行している走路がどのような走路であるかのみに基づいて、運転支援制御を開始させることが許容されるか否かを判断している。従って、従来の車両運転支援装置は、運転者が誤ってスイッチを操作していないにもかかわらず、運転支援制御を開始しないこともあり得る。
【0005】
本発明の目的は、運転支援制御の実行状態を変更することを要求するための操作が運転者により誤って行われた可能性を考慮して運転支援制御の実行状態の変更を行うことができる車両運転支援装置、車両運転支援方法及び車両運転支援プログラムを提供することにある。
【0006】
本発明に係る車両運転支援装置は、自車両の運転者の運転操作を支援する運転支援制御を実行する制御装置を備えている。前記制御装置は、前記運転支援制御の実行状態の変更を当該制御装置に要求するための前記自車両の運転者による操作である変更操作を検知したときに、前記自車両の運転者が前記変更操作を誤って行った可能性を示す誤操作確率であって前記可能性が高いほど大きくなる誤操作確率が所定誤操作確率以下である場合、前記変更操作による要求通りに前記実行状態の変更を行うように構成されている。一方、前記制御装置は、前記変更操作を検知したときに、前記誤操作確率が前記所定誤操作確率よりも大きい場合、前記実行状態の変更を行わず或いは前記変更操作により要求された前記実行状態の変更よりも緩やかな前記実行状態の変更を行うように構成されている。
【0007】
本発明に係る車両運転支援装置によれば、誤操作確率に基づいて、運転支援制御の実行状態の変更を行うか否かが判断され、或いは、運転支援制御の実行状態の変更の仕方が調整される。そして、誤操作確率は、運転支援制御の実行状態を変更することを要求するための操作が運転者により誤って行われた可能性を示している。従って、運転支援制御の実行状態を変更することを要求するための操作が運転者により誤って行われた可能性を考慮して運転支援制御の実行状態の変更を行うことができる。
【0008】
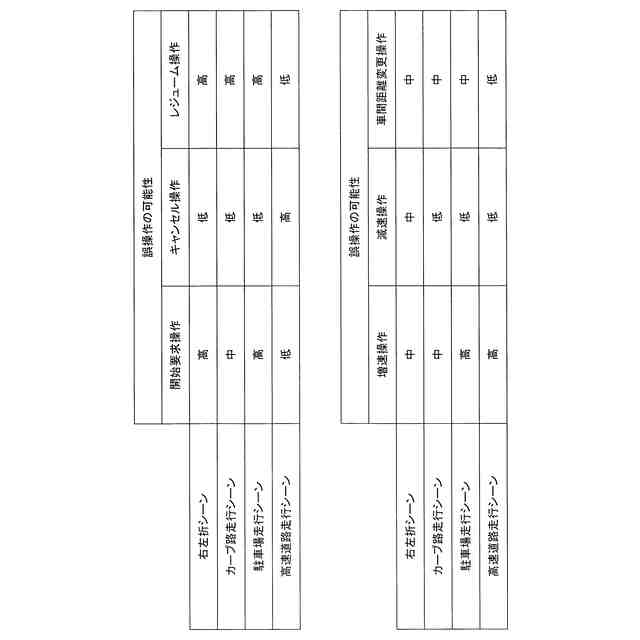
尚、本発明に係る車両運転支援装置において、例えば、前記誤操作確率は、運転者操作頻度が大きいほど小さくなり、前記運転者操作頻度は、前記自車両が前記変更操作の検知時点で走行している走路と同種の走路において前記変更操作が前記自車両の運転者により過去に行われた頻度である。或いは、前記誤操作確率は、市場操作頻度が大きいほど小さくなり、前記市場操作頻度は、前記自車両が前記変更操作の検知時点で走行している走路と同種の走路において前記変更操作により要求された前記実行状態の変更と同種の変更を要求する操作が他車両の運転者により過去に行われた頻度である。或いは、前記誤操作確率は、推奨度合が大きいほど小さくなり、前記自車両が前記変更操作の検知時点で走行している走路において前記変更操作により要求される前記実行状態の変更が推奨される度合である。
【0009】
本発明に係る車両運転支援装置によれば、運転者操作頻度、市場操作頻度及び推奨度合の少なくとも1つに基づいて運転支援制御の実行状態の変更を行うことができる。
【0010】
又、本発明に係る車両運転支援装置において、前記制御装置は、前記変更操作を検知したときに前記実行状態の変更を行わない場合、前記実行状態の変更を行うことの承認を求める承認要求通知を前記自車両の運転者に対して行い、前記自車両の運転者が前記実行状態の変更を行うことを承認した場合、前記実行状態の変更を行うように構成され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
通信装置
6日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
送電装置
6日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
液系電池
7日前
トヨタ自動車株式会社
ステータ
7日前
トヨタ自動車株式会社
溶接装置
3日前
トヨタ自動車株式会社
電源装置
6日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
車両構造
7日前
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
電気自動車
6日前
トヨタ自動車株式会社
電気自動車
6日前
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電子制御装置
6日前
トヨタ自動車株式会社
制御ユニット
5日前
トヨタ自動車株式会社
ガス供給装置
6日前
トヨタ自動車株式会社
衝突判定装置
3日前
トヨタ自動車株式会社
車両上部構造
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
運転支援装置
3日前
トヨタ自動車株式会社
学習システム
3日前
トヨタ自動車株式会社
給電支援装置
5日前
トヨタ自動車株式会社
歩行ロボット
3日前
トヨタ自動車株式会社
学習システム
今日
トヨタ自動車株式会社
車両前部構造
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ