TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146694
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2025024174
出願日
2025-02-18
発明の名称
モータ制御装置
出願人
株式会社ミツバ
代理人
弁理士法人筒井国際特許事務所
主分類
H02P
6/08 20160101AFI20250926BHJP(電力の発電,変換,配電)
要約
【課題】車両の開閉体を作動状態に拘わらず滑らかに自動開閉させるように、駆動モータをより適切に制御できるモータ制御装置を提供する。
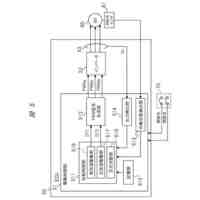
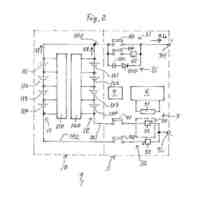
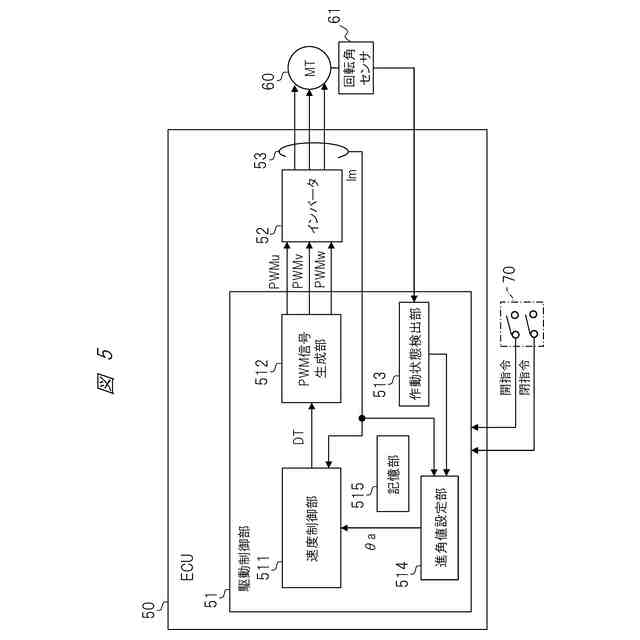
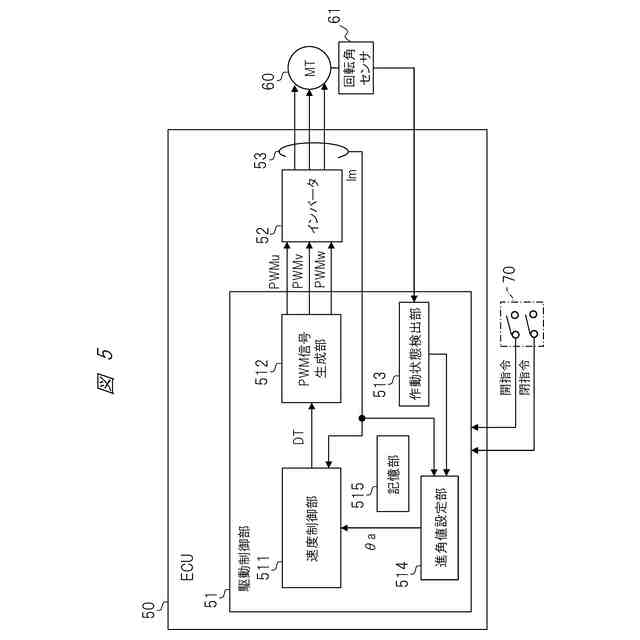
【解決手段】駆動モータ60に駆動電力を供給するためのモータ制御信号を生成する制御信号生成部512と、モータ制御信号の位相を進角させるための制御進角値θaを設定する進角値設定部514と、開閉体の作動状態を検出する作動状態検出部513と、を有し、進角値設定部514は、作動状態検出部513により検出された開閉体の作動状態に応じて制御進角値θaを設定する。
【選択図】図5
特許請求の範囲
【請求項1】
車両の開閉体に接続されて前記開閉体を自動開閉させるための駆動モータを制御するモータ制御装置であって、
前記駆動モータに駆動電力を供給するためのモータ制御信号を生成する制御信号生成部と、
前記モータ制御信号の位相を進角させるための制御進角値を設定する進角値設定部と、
前記開閉体の作動状態を検出する作動状態検出部と、を有し、
前記進角値設定部は、前記作動状態検出部により検出された前記開閉体の作動状態に応じて前記制御進角値を設定する、
モータ制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のモータ制御装置において、
前記作動状態検出部は、前記開閉体の実作動速度を検出し、
前記進角値設定部は、前記作動状態検出部により検出された前記開閉体の実作動速度に応じて前記制御進角値を設定する、
モータ制御装置。
【請求項3】
請求項2に記載のモータ制御装置において、
前記作動状態検出部は、前記開閉体の負荷を検出し、
前記進角値設定部は、前記作動状態検出部により検出された前記開閉体の負荷に応じて前記制御進角値を設定する、
モータ制御装置。
【請求項4】
請求項1に記載のモータ制御装置において、
前記制御進角値は、予め設定される固定値である基本進角値に追加進角値を加算することで算出され、
前記進角値設定部は、前記作動状態検出部により検出された前記開閉体の作動状態に応じて前記追加進角値を設定する、
モータ制御装置。
【請求項5】
請求項4に記載のモータ制御装置において、
前記進角値設定部は、前記開閉体の実作動速度に基づく速度進角値を用いて前記追加進角値を算出する、
モータ制御装置。
【請求項6】
請求項5に記載のモータ制御装置において、
前記進角値設定部は、前記開閉体の実作動速度に当該開閉体の実作動速度に応じて予め設定される速度進角割合を乗算することで前記速度進角値を算出する、
モータ制御装置。
【請求項7】
請求項5に記載のモータ制御装置において、
前記駆動モータの回転角を検出する回転角センサを備え、
前記進角値設定部は、前記回転角センサの出力信号の周期に当該回転角センサの出力信号の周期に応じて予め設定される第1速度進角割合を乗算することで前記速度進角値を算出する、
モータ制御装置。
【請求項8】
請求項4に記載のモータ制御装置において、
前記進角値設定部は、前記駆動電力の出力デューティに当該駆動電力の出力デューティに応じて予め設定される第1負荷進角割合を乗算した第1負荷進角値を用いて、前記追加進角値を算出する、
モータ制御装置。
【請求項9】
請求項4に記載のモータ制御装置において、
前記進角値設定部は、前記駆動モータの作動電流に当該駆動モータの作動電流に応じて予め設定される第2負荷進角割合を乗算した第2負荷進角値を用いて、前記追加進角値を算出する、
モータ制御装置。
【請求項10】
請求項8に記載のモータ制御装置において、
前記進角値設定部は、前記開閉体の実作動速度に基づく速度進角値に前記第1負荷進角値を加算することで前記追加進角値を算出する、
モータ制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の開閉体を自動開閉させるための駆動モータを制御するモータ制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、車両が備える開閉体、例えば、スライドドアを自動開閉させるための駆動モータを制御するモータ制御装置において、モータ制御信号の位相を進角させるための進角値を設定する、いわゆる進角制御が行われることがある。
【0003】
特許文献1には、モータの駆動により車両の開閉体を自動で開閉させる自動開閉作動と、開閉体に対する手動操作力をモータの駆動力でアシストして開閉体を開閉させるアシスト開閉作動と、を行う車両用開閉体制御装置において、アシスト開閉作動時に、自動開閉作動時よりも、モータ駆動信号の位相を進角させるための進角値を設定すること、が記載されている。
【0004】
より詳しくは、特許文献1には、アシスト開閉作動時、利用者の手動操作力によってスライドドアの移動速度が変化する場合にモータの回転速度を取得し、取得したモータの回転速度に応じた進角値を設定することが記載されている。また引用文献1には、自動開作動時は、進角値を設定しない、あるいはアシスト開閉動作時の進角値よりも小さい値に設定することが記載されている。
【先行技術文献】
【特許文献】
【0005】
特許第6939447号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に係る発明では、アシスト開閉作動時には、利用者の手動操作力によって変化するモータの回転速度に応じて進角値が設定される。これにより、開閉体の開閉動作をより適切に制御し易くなる。一方で、利用者の手動操作力によらず開閉体を自動開閉させる際には、進角値は設定しないか、あるいは固定値に設定されていると考えられる。このため、例えば、車両の開閉体を自動開閉させる場所や環境、自動開閉中の開閉体の位置等、開閉体の作動状態によっては、開閉体を滑らかに作動させることができない虞がある。
【0007】
本開示の一つの目的は、車両の開閉体を作動状態に拘わらず滑らかに自動開閉させるように、駆動モータをより適切に制御できるモータ制御装置を提供することである。
【課題を解決するための手段】
【0008】
本開示のモータ制御装置は、車両の開閉体に接続されて前記開閉体を自動開閉させるためのモータを制御するモータ制御装置であって、前記モータの駆動電力を供給するためのモータ制御信号を生成する制御信号生成部と、前記モータ制御信号の位相を進角させるための進角値を設定する進角値設定部と、前記開閉体の作動状態を検出する作動状態検出部と、前記作動状態検出部により検出された前記開閉体の作動状態に応じて、前記進角値設定部により設定された前記進角値を変更する進角値変更部と、を有する。
【発明の効果】
【0009】
本開示のモータ制御装置によれば、車両の開閉体を作動状況に拘わらず滑らかに自動開閉させるように、駆動モータをより適切に制御することができる。
【図面の簡単な説明】
【0010】
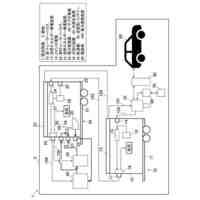
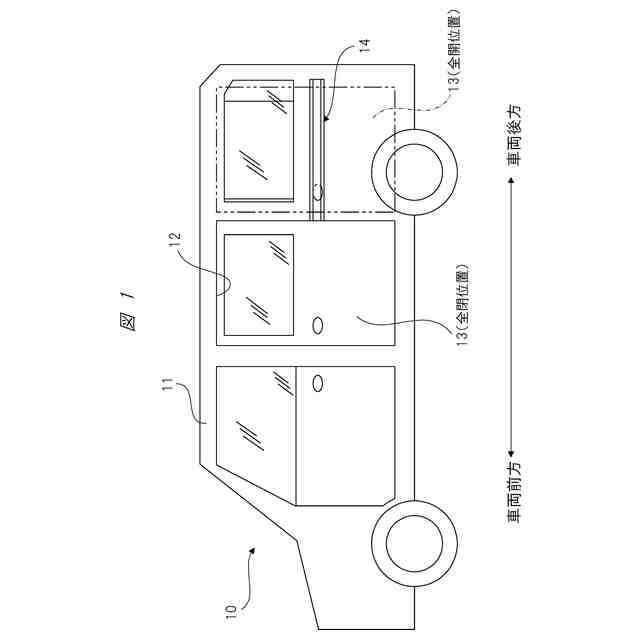
一実施形態のモータ制御装置が搭載される車両の概略構成例を示す側面図である。
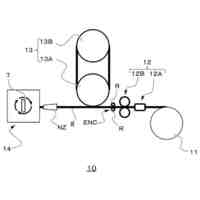
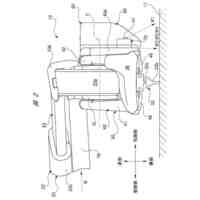
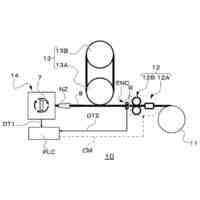
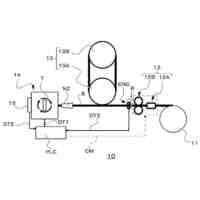
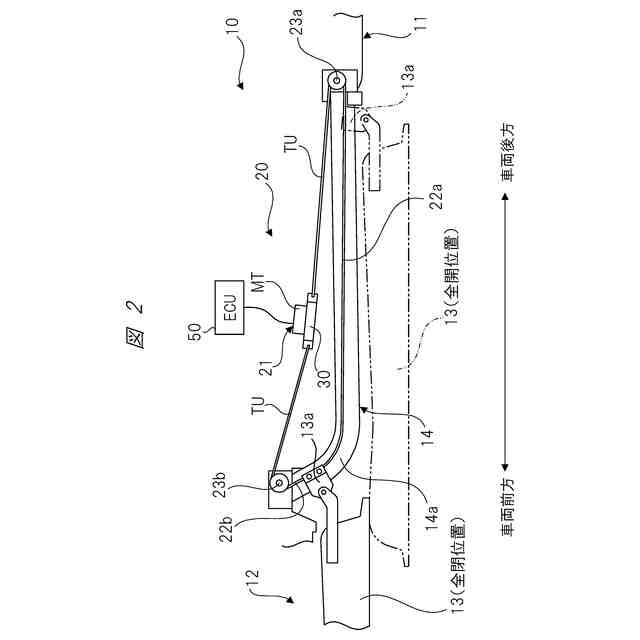
一実施形態に係るモータ制御装置を含む車両用開閉体制御装置の構成例を示す平面図である。
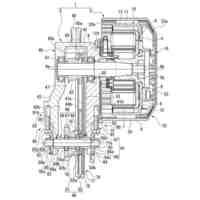
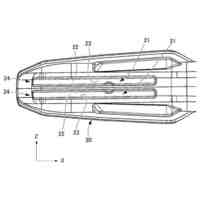
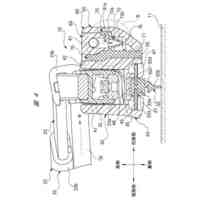
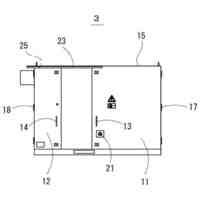
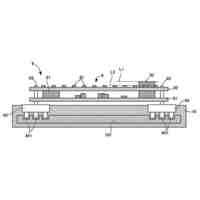
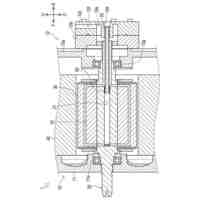
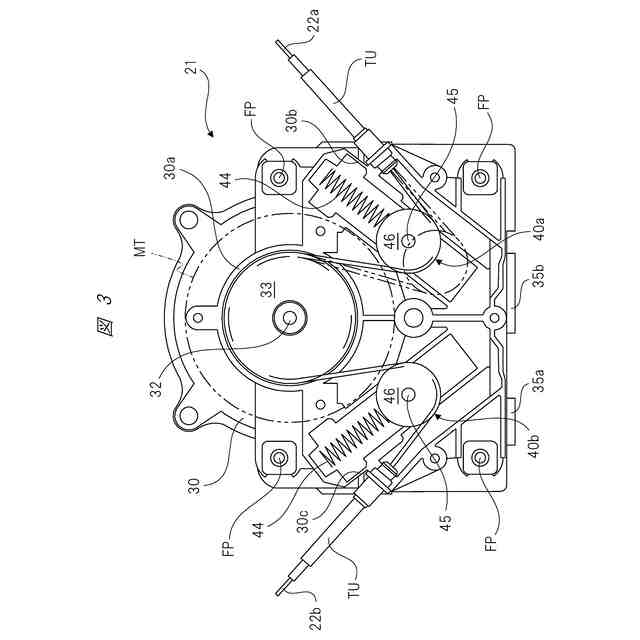
車両用開閉体制御装置が備える駆動ユニットの構成例を示す正面図である。
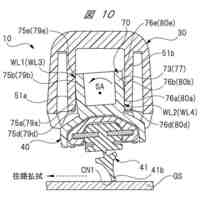
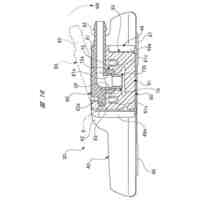
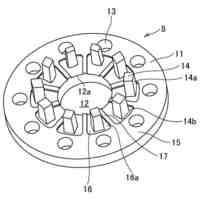
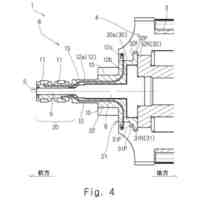
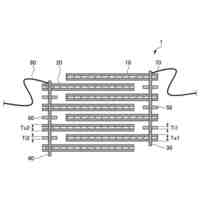
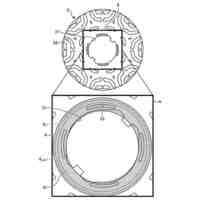
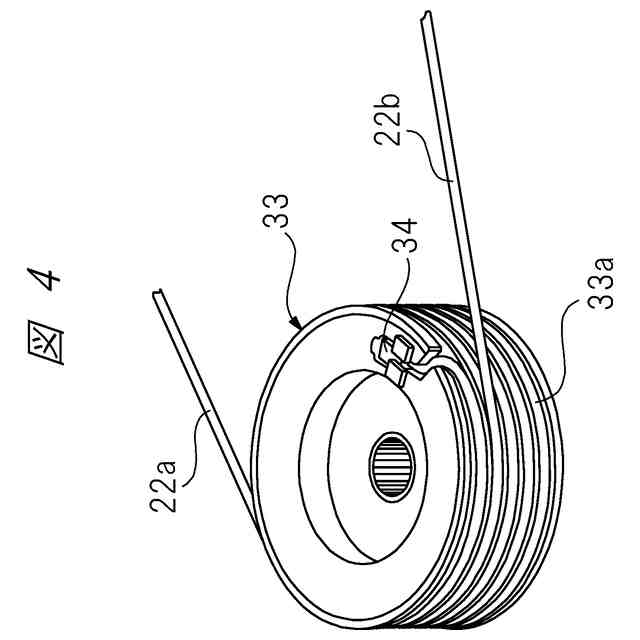
駆動ユニットが備えるドラムの構成例を示す斜視図である。
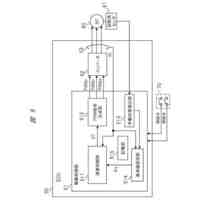
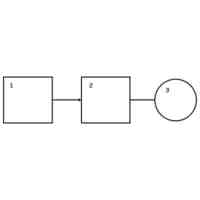
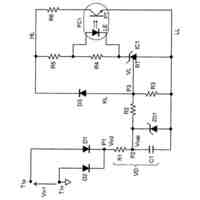
一実施形態のモータ制御装置の主要部の構成例を示す概略図である。
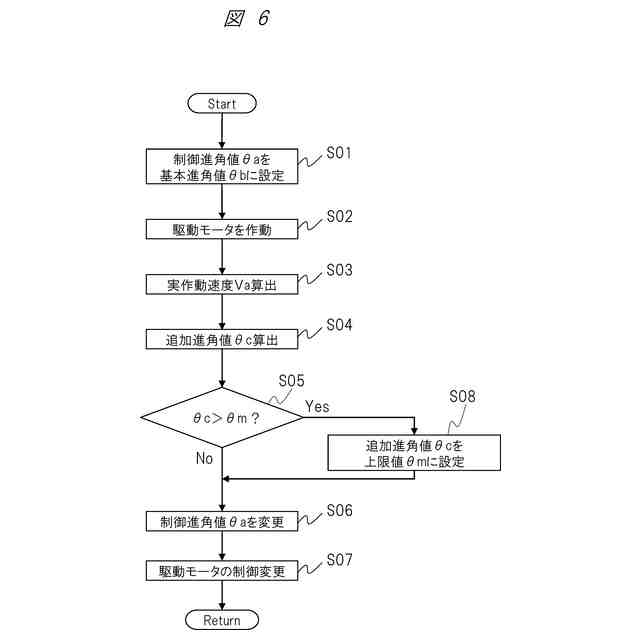
制御進角値の設定・変更手順の一例を示すフローチャートである。
スライドドアの実作動速度と追加進角値との関係を規定したテーブルの一例を示す図である。
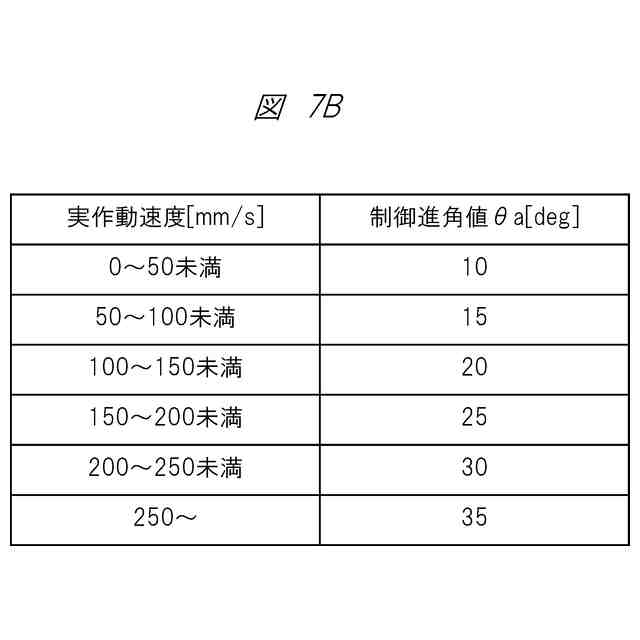
スライドドアの実作動速度と制御進角値との関係を規定したテーブルの一例を示す図である。
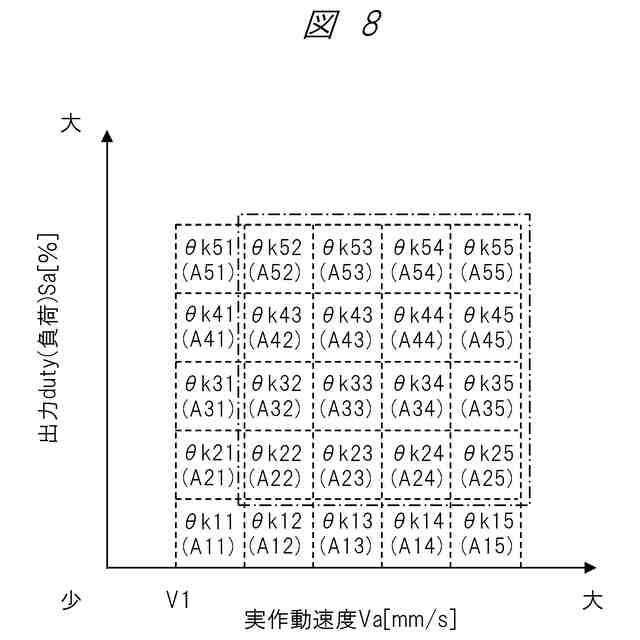
実作動速度および出力デューティと補正量との関係を規定したマップの一例を示す図である。
スライドドアのドア位置と目標速度との関係の一例を示す図である。
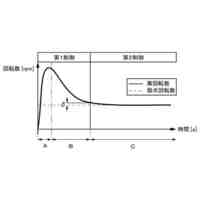
始動時設定制御と通常時設定制御との遷移を説明する図である。
進角値設定部による始動時設定制御の一例を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツバ
モータ
23日前
株式会社ミツバ
巻線装置
7日前
株式会社ミツバ
ワイパ装置
今日
株式会社ミツバ
ワイパ装置
今日
株式会社ミツバ
モータ装置
25日前
株式会社ミツバ
非容積型ポンプ
15日前
株式会社ミツバ
車両用灯火装置
1か月前
株式会社ミツバ
モータ制御装置
今日
株式会社ミツバ
モータ制御装置
今日
株式会社ミツバ
ワイパブレード
2日前
株式会社ミツバ
ワイパブレード
2日前
株式会社ミツバ
ワイパブレード
2日前
株式会社ミツバ
巻線装置、及び、巻線方法
7日前
株式会社ミツバ
巻線装置、及び、巻線方法
7日前
株式会社ミツバ
モータの制御装置、及び、その制御方法
1か月前
株式会社ミツバ
マグネットホルダ及び電動モータ用ロータ
1か月前
株式会社ミツバ
鞍乗型電動車両の制御システム、及び鞍乗型電動車両の制御方法
23日前
個人
電源装置
15日前
個人
バッテリ内蔵直流電源
14日前
株式会社FUJI
制御盤
4日前
オムロン株式会社
電源回路
8日前
オムロン株式会社
電源回路
8日前
オムロン株式会社
電源回路
8日前
日産自動車株式会社
電子機器
25日前
ニデック株式会社
モータの制御方法
22日前
トヨタ自動車株式会社
回転子
今日
トヨタ自動車株式会社
回転子
15日前
ミサワホーム株式会社
居住設備
4日前
大豊工業株式会社
モータ
14日前
東京応化工業株式会社
発電装置
8日前
株式会社リコー
拡張アンテナ装置
7日前
ニチコン株式会社
AC入力検出回路
今日
ユタカ電業株式会社
ケーブルダクト
4日前
トヨタ自動車株式会社
ロータ
2日前
日産自動車株式会社
ステータ
1日前
富士電子工業株式会社
電力変換装置
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ