TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025119941
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015079
出願日
2024-02-02
発明の名称
モータの制御装置、及び、その制御方法
出願人
株式会社ミツバ
代理人
弁理士法人武和国際特許事務所
主分類
H02P
6/16 20160101AFI20250807BHJP(電力の発電,変換,配電)
要約
【課題】モータ始動時に大きく回転数が変化する駆動制御を行うモータであっても、ロータの磁極位置を検出したタイミングと異なるタイミングでの通電切替を行う駆動制御の適用が可能なモータの制御装置を提供する。
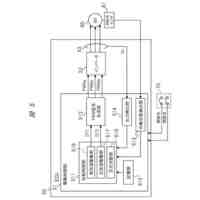
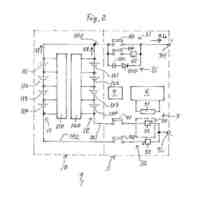
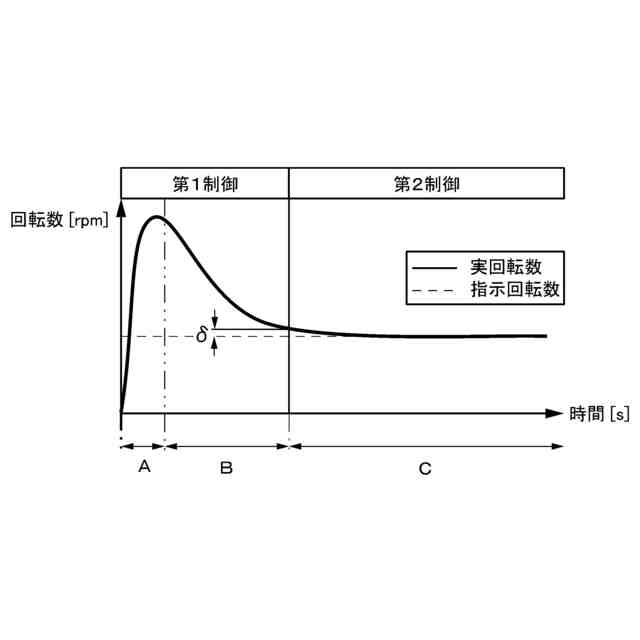
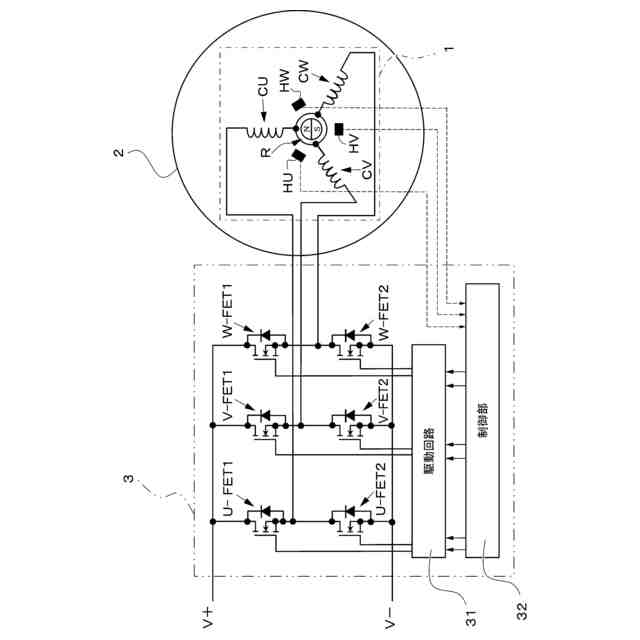
【解決手段】本発明のモータ始動時に最大電流制御による駆動制御を行った後、定常時の駆動制御に移行するモータの制御装置3は、U相、V相、及び、W相の通電を切替える制御部32を備え、制御部32が、切替をロータの磁極位置を検出した第1タイミングで行うモータ駆動初期の第1制御と、切替を第1タイミングと異なる第2タイミングで行う定常時の第2制御と、を行い、制御部32は、第1制御から第2制御への移行を定常時の運転状態に近づいた所定のタイミングで行う。
【選択図】図5
特許請求の範囲
【請求項1】
モータ始動時に最大電流制御による駆動制御を行った後、定常時の駆動制御に移行するモータの制御装置であって、
前記制御装置は、
U相、V相、及び、W相の通電を切替える制御部を備え、
前記制御部が、
前記切替をロータの磁極位置を検出した第1タイミングで行うモータ駆動初期の第1制御と、
前記切替を前記第1タイミングと異なる第2タイミングで行う定常時の第2制御と、を行い、
前記制御部は、前記第1制御から前記第2制御への移行を前記定常時の運転状態に近づいた所定のタイミングで行う、制御装置。
続きを表示(約 730 文字)
【請求項2】
前記第2制御が、進角制御、又は、広角通電である、請求項1に記載の制御装置。
【請求項3】
前記所定のタイミングが、モータ始動後、あらかじめ設定された時間が経過したタイミングである、請求項2に記載の制御装置。
【請求項4】
前記所定のタイミングは、モータ始動後、前記定常時のモータの指示回転数と実回転数との絶対偏差が、あらかじめ定められる閾値以内になったタイミングである、請求項2に記載の制御装置。
【請求項5】
前記所定のタイミングは、モータ始動後、角加速度の絶対値が、あらかじめ定められる閾値以内になったタイミングである、請求項2に記載の制御装置。
【請求項6】
前記磁極位置の検出が、モータに設けられたU相ホールセンサ、V相ホールセンサ、及び、W相ホールセンサの出力信号によって行われる、請求項3から請求項5のいずれか1項に記載の制御装置。
【請求項7】
前記磁極位置の検出が、モータに設けられた絶対角度センサの出力信号によって行われる、請求項3から請求項5のいずれか1項に記載の制御装置。
【請求項8】
モータ始動時に最大電流制御による駆動制御を行った後、定常時の駆動制御に移行するモータの制御方法であって、
ロータの磁極位置を検出した第1タイミングでU相、V相、及び、W相の通電を切替えるモータ駆動初期の第1制御と、
前記切替を前記第1タイミングと異なる第2タイミングで行う定常時の第2制御と、を行い、
前記第1制御から前記第2制御への移行を前記定常時の運転状態に近づいた所定のタイミングで行う、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータの制御装置、及び、その制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、電動オイルポンプ装置では、ポンプを駆動させるためのモータとして、ブラシレスモータが使用される場合がある。
ブラシレスモータを駆動させる場合、回転角センサを利用することが多く、回転角センサには、例えば、ホールICやTMR(Tunnel magnetoresistance effect)センサ等が用いられている。
【0003】
そして、TMRセンサで回転角を検出する場合、モータシャフトに取り付けたTMRセンサ用マグネットの磁力をTMRセンサで検出し、検出した磁力からモータの回転角を求める。
【0004】
しかし、モータシャフトに取り付けたTMRセンサ用マグネットと、モータのマグネットの相対位置が不定の場合、TMRセンサは、モータの回転角を相対位置として求めることはできるが、絶対位置として回転角を求めることはできない。
【0005】
そのため、TMRセンサでは、モータの初期位置を特定するためにゼロ点検出を行う必要がある。
そこで、特許文献1では、ブラシレスモータの誘起電圧に基づいて、回転角センサの角度補正を行うことで、回転角センサの角度補正を行うために追加の構成が不要なモータ制御装置、及び、その制御方法を開示している。
【先行技術文献】
【特許文献】
【0006】
特開2023-32765号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
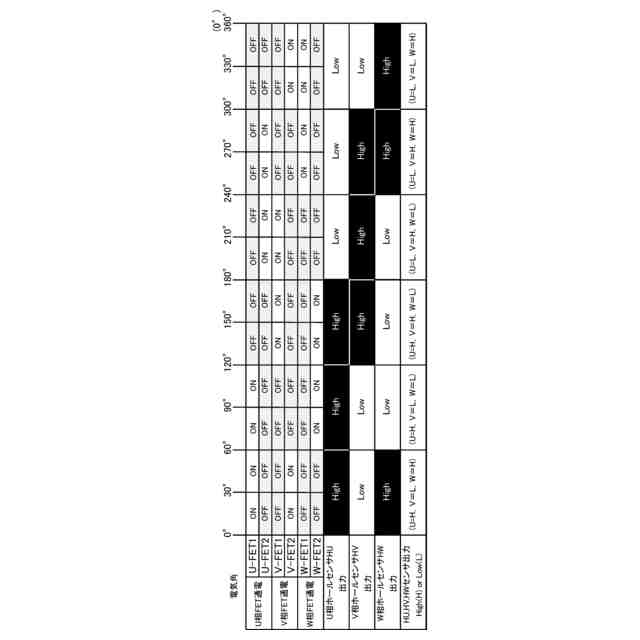
ところで、特許文献1では、モータの磁極位置の検出タイミングに応じて電気角120°ごとに通電切替を行う120°通電方式でモータの駆動制御が行われている。
しかし、モータの磁極位置の検出タイミングから位相を進めた位置で通電切替を行う進角制御や、通電切替を120°より広げた通電角の位置で行う広角通電を行う方が、モータの性能を向上させることができる。
【0008】
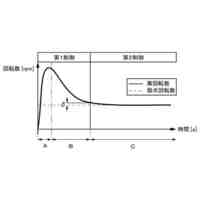
一方、電動オイルポンプに用いられるモータでは、モータ始動時にトルクを確保する必要がある。
このため、電動オイルポンプに用いられるモータでは、モータ始動時に最大電流制御による駆動制御が行われ、モータの回転数がほぼ最大回転数に到達した後、定常時の回転数に向けて、大きく回転数が変化する。
【0009】
そして、進角制御や広角通電は、モータの磁極位置の検出タイミングとモータの回転数から適切な通電切替のタイミングを予測し、ロータの磁極位置を検出したタイミングと異なるタイミングでの通電切替を行うため、上述のように、大きく回転数が変化する場合、適用が困難であるという問題がある。
【0010】
本発明は、このような事情に鑑みてなされたものであり、モータ始動時に大きく回転数が変化する駆動制御を行うモータであっても、ロータの磁極位置を検出したタイミングと異なるタイミングでの通電切替を行う駆動制御の適用が可能なモータの制御装置、及び、その制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツバ
モータ
23日前
株式会社ミツバ
巻線装置
7日前
株式会社ミツバ
ワイパ装置
2か月前
株式会社ミツバ
ワイパ装置
今日
株式会社ミツバ
ワイパ装置
今日
株式会社ミツバ
モータ装置
25日前
株式会社ミツバ
車両用灯火装置
1か月前
株式会社ミツバ
モータ制御装置
今日
株式会社ミツバ
モータ制御装置
今日
株式会社ミツバ
ワイパブレード
2日前
株式会社ミツバ
ワイパブレード
2日前
株式会社ミツバ
ワイパブレード
2日前
株式会社ミツバ
非容積型ポンプ
15日前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
電動車両及びハブモータ
2か月前
株式会社ミツバ
巻線装置、及び、巻線方法
7日前
株式会社ミツバ
巻線装置、及び、巻線方法
7日前
株式会社ミツバ
モータの制御装置、及び、その制御方法
1か月前
株式会社ミツバ
マグネットホルダ及び電動モータ用ロータ
1か月前
株式会社ミツバ
鞍乗型電動車両の制御システム、及び鞍乗型電動車両の制御方法
23日前
個人
電源装置
15日前
個人
バッテリ内蔵直流電源
14日前
株式会社FUJI
制御盤
4日前
オムロン株式会社
電源回路
8日前
オムロン株式会社
電源回路
8日前
オムロン株式会社
電源回路
8日前
日産自動車株式会社
電子機器
25日前
ニデック株式会社
モータの制御方法
22日前
トヨタ自動車株式会社
回転子
15日前
トヨタ自動車株式会社
回転子
今日
東京応化工業株式会社
発電装置
8日前
井関農機株式会社
充電システム
25日前
ミサワホーム株式会社
居住設備
4日前
大豊工業株式会社
モータ
14日前
株式会社リコー
拡張アンテナ装置
7日前
富士電子工業株式会社
電力変換装置
16日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ