TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160880
公報種別
公開特許公報(A)
公開日
2025-10-23
出願番号
2025026052
出願日
2025-02-20
発明の名称
表面仕上げのためのシステム及び方法
出願人
ザ・ボーイング・カンパニー
代理人
個人
,
個人
,
個人
主分類
G05B
19/4093 20060101AFI20251016BHJP(制御;調整)
要約
【課題】表面仕上げのためのシステム及び方法を提供する。
【解決手段】構成要素の表面の自動サンディングのためのシステムは、モデル生成器と、モデル解析器と、経路プランナとを含む。モデル生成器は、構成要素の表面の少なくとも一部を表すモデルを生成するように構成されている。モデル解析器は、表面の起伏を決定するためにモデルを解析するように構成されている。経路プランナは、サンディング計画を生成するように構成されている。
【選択図】図2
特許請求の範囲
【請求項1】
構成要素(106)の表面(118)の少なくとも一部を表すモデル(104)を生成するモデル生成器(102)と、
前記表面(118)の起伏(184)を決定するために前記モデル(104)を解析するモデル解析器(112)と、
サンディング計画(208)を生成する経路プランナ(212)と、
を備える、システム。
続きを表示(約 1,300 文字)
【請求項2】
前記構成要素(106)の前記表面(118)の少なくとも前記一部を表す測定データ(138)を生成する測定システム(136)をさらに備え、
前記測定データ(138)は、前記モデル(104)を生成するために使用される、請求項1に記載のシステム。
【請求項3】
前記サンディング計画(208)に従って前記表面(118)をサンディングするロボットサンダ(204)をさらに備える、請求項1に記載のシステム。
【請求項4】
前記モデル解析器(112)は、
前記構成要素(106)の前記モデル(104)と公称モデル(124)との間の法線方向(150)における全体偏差(122)を決定し、
前記法線方向(150)における前記全体偏差(122)の全体寸法(164)を決定する、
ようにさらに構成されている、請求項1に記載のシステム。
【請求項5】
前記モデル解析器(112)は、前記全体偏差(122)を決定するために、前記構成要素(106)の前記モデル(104)と前記公称モデル(124)との間の最良適合整列を実施するようにさらに構成されている、請求項4に記載のシステム。
【請求項6】
前記モデル解析器(112)は、
XYZ座標系(126)からUVW座標系(128)への前記全体偏差(122)をマッピングし、それにより、前記全体偏差(122)の全体寸法(164)についての値(130)がW軸線(152)に沿って表され、
前記全体偏差(122)の前記全体寸法(164)についての前記値(130)を形態偏差(132)及び起伏偏差(134)にフィルタリングする、
ようにさらに構成されている、請求項4に記載のシステム。
【請求項7】
前記モデル解析器(112)は、ローパスフィルタ(156)及びロバストガウス回帰フィルタ(158)のうちの一方を使用して前記値(130)をフィルタリングする、請求項6に記載のシステム。
【請求項8】
前記モデル解析器(112)は、前記起伏偏差(134)によって前記公称モデル(124)を修正し、それにより、前記起伏偏差(134)によって修正された前記公称モデル(124)が前記構成要素(106)の前記表面(118)の前記起伏(184)を表すように構成されている、請求項6に記載のシステム。
【請求項9】
前記モデル解析器(112)は、前記UVW座標系(128)から前記XYZ座標系(126)への前記起伏偏差(134)をマッピングし、それにより、前記起伏偏差(134)の起伏寸法(168)についての値(130)が前記公称モデル(124)に対する距離(160)として表されるようにさらに構成されている、請求項8に記載のシステム。
【請求項10】
前記モデル生成器(102)、前記モデル解析器(112)、及び前記経路プランナ(212)は、データ処理システム(900)によって実行されるプログラムコード(918)の形態をとる、請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
優先権
本出願は、2024年4月10日に出願された米国特許出願第63/632,096号明細書の優先権を主張し、その全内容は、参照により本明細書に組み込まれる。
続きを表示(約 1,700 文字)
【0002】
本開示は、一般に、表面仕上げ動作に関し、より詳細には、自動サンディング及びサンディング経路計画のためのシステム及び方法に関する。
【背景技術】
【0003】
サンディング、研削、及び研磨などの表面仕上げは、製造された部品の表面品質を改善するための重要なプロセスであり得る。表面仕上げ動作は、手動で実施されるか、または産業用ロボット自動化技術を使用して自動化される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
それにもかかわらず、仕上げられる表面の起伏を適切に決定することは困難であり、これは過剰な仕上げをもたらす可能性がある。したがって、当業者は、表面仕上げ動作における研究開発努力を継続している。
【課題を解決するための手段】
【0005】
自動サンディングのためのシステム、自動サンディングのための方法、及びコンピュータプログラム製品の例が開示される。以下は、本開示による主題の、特許請求されるものもされないものもある例の非網羅的なリストである。
【0006】
一例では、開示されたシステムは、構成要素の表面の少なくとも一部を表すモデルを生成するモデル生成器を含む。システムは、表面の起伏を決定するためにモデルを解析するモデル解析器を含む。システムは、サンディング計画を生成する経路プランナ(path planner)を含む。
【0007】
一例では、開示された方法は、(1)構成要素のモデルを生成するステップと、(2)構成要素の表面の起伏を決定するためにモデルを解析するステップと、(3)ロボットサンダによる使用のためのサンディング計画を生成するステップとを含む。
【0008】
一例では、開示されたコンピュータプログラム製品は、1以上のプロセッサによって実行されると、1以上のプロセッサに、(1)測定データから構成要素のモデルを生成するステップと、(2)構成要素の表面の起伏の寸法を決定するためにモデルを解析するステップと、(3)起伏を除去するためにロボットサンダによって使用されるサンディング計画を生成するステップとを含む動作を実施させるプログラムコードを有する、非一時的コンピュータ読取可能媒体を含む。
【0009】
システム、方法、及びコンピュータプログラム製品の他の例は、以下の詳細な説明、添付の図面、及び添付の特許請求の範囲から明らかになるであろう。
【図面の簡単な説明】
【0010】
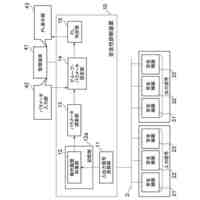
製造環境の一例の概略ブロック図である。
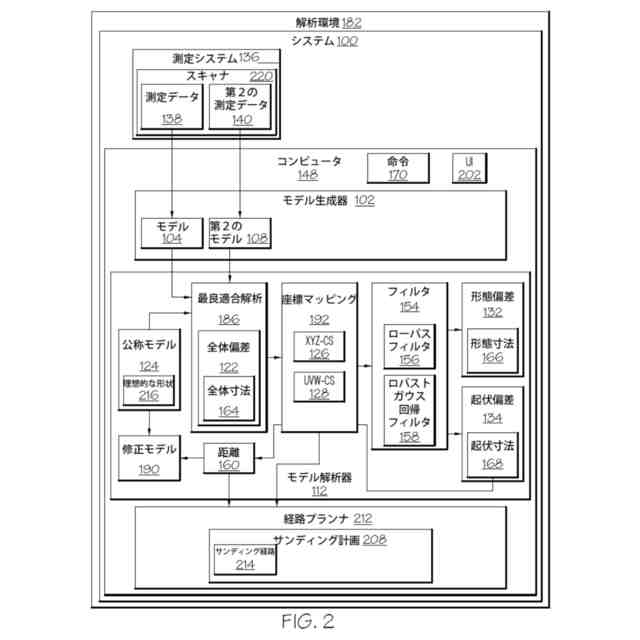
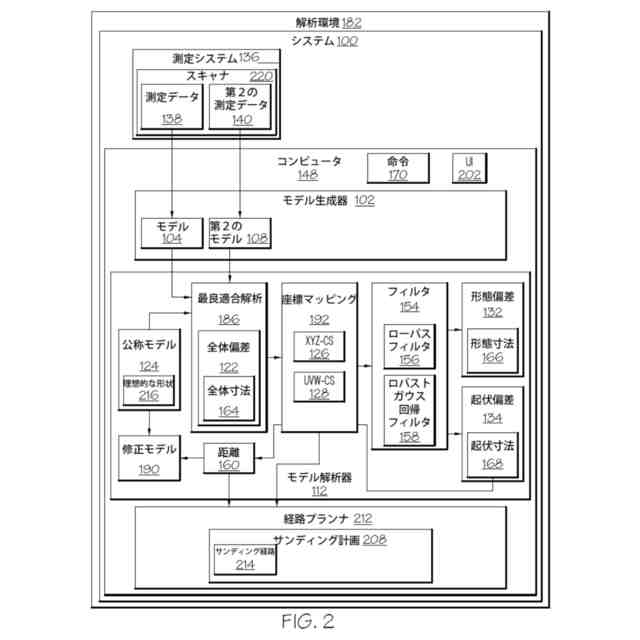
解析環境の一例の概略ブロック図である。
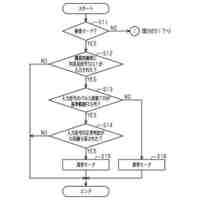
自動表面仕上げのための方法の一例のフロー図である。
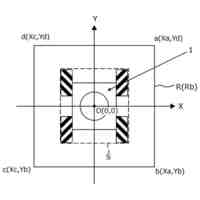
構成要素の一部及び測定システムの一例の概略図である。
構成要素の一部を表すモデルの一例のグラフ図である。
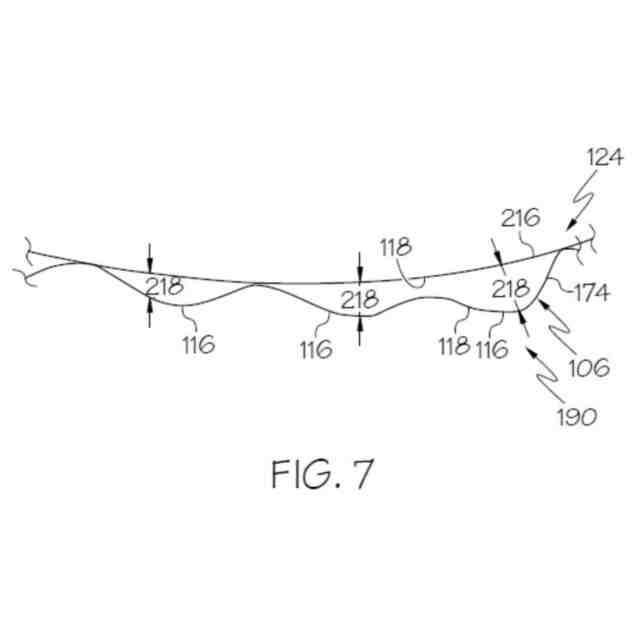
構成要素を表すモデル及び構成要素を表す公称モデルの一部の一例のグラフ図である。
構成要素を表す修正モデル及び構成要素を表す公称モデルの一部の一例のグラフ図である。
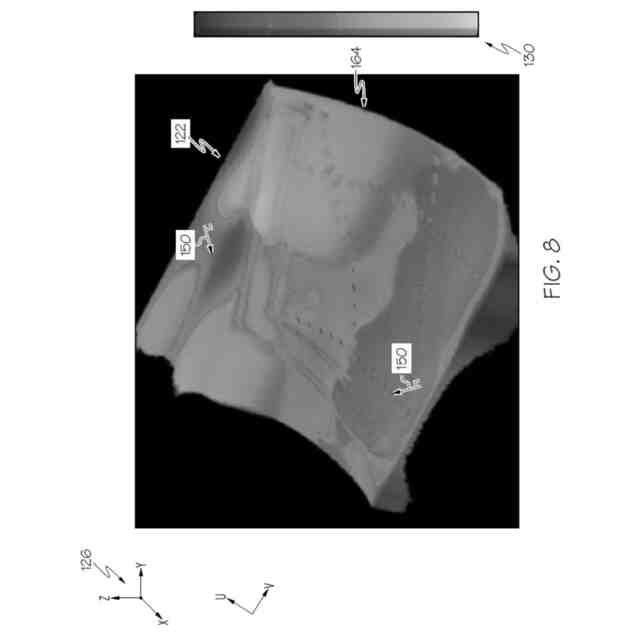
XYZ座標系における構成要素のモデルと構成要素の公称モデルとの間の全体偏差の一例のグラフ図である。
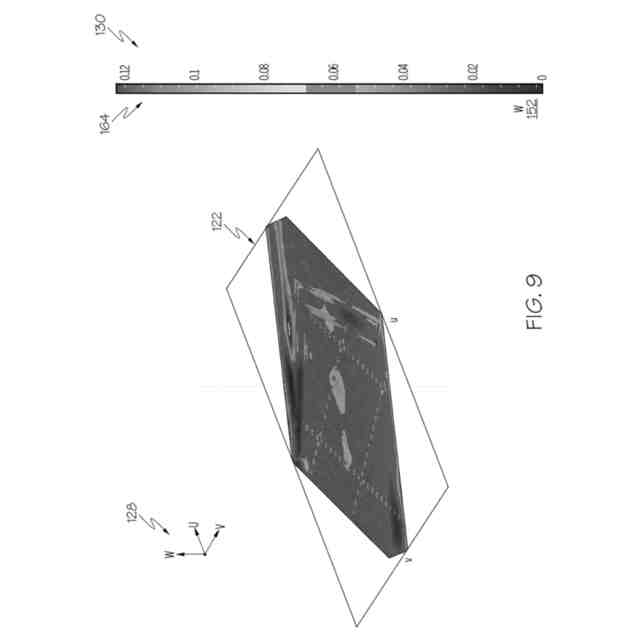
UVW座標系におけるモデルと公称モデルとの間の全体偏差の一例のグラフ図である。
UVW座標系におけるモデルと公称モデルとの間の形態偏差の一例のグラフ図である。
UVW座標系におけるモデルと公称モデルとの間の起伏偏差の一例のグラフ図である。
XYZ座標系におけるモデルと公称モデルとの間の起伏偏差の一例のグラフ図である。
XYZ座標系におけるサンディング計画の一例のグラフ図である。
構成要素の一部及びロボットサンダの一例の概略図である。
データ処理システムの一例のブロック図である。
航空機の製造方法の一例のフロー図である。
航空機の一例の概略ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社熊谷組
障害物の検出方法
21日前
株式会社FUJI
加工機械ライン
3か月前
ローム株式会社
基準電圧源
1か月前
愛知製鋼株式会社
車両用システム
2か月前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
19日前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
26日前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
株式会社ダイフク
物品搬送設備
3か月前
カヤバ株式会社
減圧弁
28日前
トヨタ自動車株式会社
制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
3か月前
キヤノン株式会社
配送システム
1か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
エイブリック株式会社
電流補償回路及び半導体装置
15日前
株式会社ダイフク
物品搬送設備
今日
アズビル株式会社
制御システムおよび制御方法
3か月前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
株式会社TMEIC
安全性診断装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ