TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109459
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024003361
出願日
2024-01-12
発明の名称
情報処理装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
G08G
1/01 20060101AFI20250717BHJP(信号)
要約
【課題】移動体によって収集されたプローブデータに基づいて道路グラフを生成する。
【解決手段】道路の位置情報を含む第一の地図データを取得し、道路上を移動する第一の移動体によって測位された、前記第一の移動体の位置情報の集合を含むプローブデータを取得し、前記第一の地図データを教師データ、前記プローブデータを入力データとして機械学習モデルを学習させ、前記学習済みの機械学習モデルを用いて、第二の移動体の位置情報の集合を含む第二のプローブデータを、道路の位置情報を含む道路グラフに変換する。
【選択図】図1
特許請求の範囲
【請求項1】
道路の位置情報を含む第一の地図データを取得することと、
道路上を移動する第一の移動体によって測位された、前記第一の移動体の位置情報の集合を含むプローブデータを取得することと、
前記第一の地図データを教師データ、前記プローブデータを入力データとして機械学習モデルを学習させることと、
前記学習済みの機械学習モデルを用いて、第二の移動体の位置情報の集合を含む第二のプローブデータを、道路の位置情報を含む道路グラフに変換することと、
を実行する制御部を有する、情報処理装置。
続きを表示(約 460 文字)
【請求項2】
前記制御部は、前記第一の移動体の位置情報の集合と、実際の道路との相対的な位置関係を前記機械学習モデルに学習させる、
請求項1に記載の情報処理装置。
【請求項3】
前記第一の地図データは、道路の中心線の位置情報を含み、
前記制御部は、前記第一の地図データに含まれる道路の中心線の位置情報を教師データとして前記機械学習モデルを学習させる、
請求項1に記載の情報処理装置。
【請求項4】
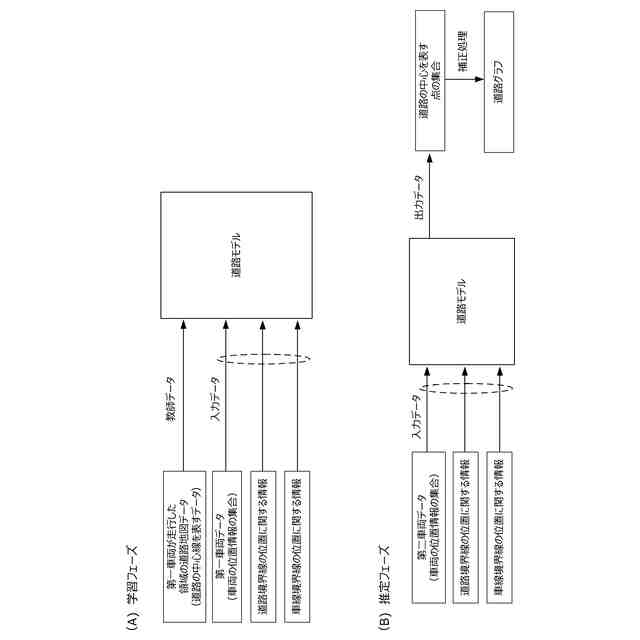
前記制御部は、前記第二のプローブデータに含まれる位置情報の集合を前記学習済みの機械学習モデルに入力し、推定結果として、道路の中心線の位置情報の集合を取得する、
請求項3に記載の情報処理装置。
【請求項5】
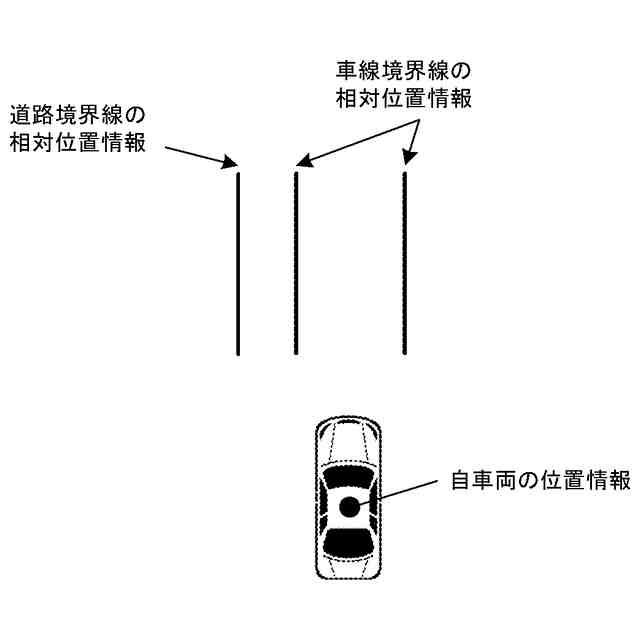
前記プローブデータは、道路境界線および/または車線境界線の位置に関するデータをさらに含み、
前記制御部は、当該データを入力データにさらに含ませて前記機械学習モデルを学習させる、
請求項1に記載の情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、道路情報の収集に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
高精度な地図データを生成するため、車両によって収集されたプローブデータを利用する技術がある。これに関連して、例えば、特許文献1には、蓄積されたプローブデータに基づいて、既存のデジタル道路網をアップデートするシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-515974号公報
特開2020-516853号公報
特開2009-503638号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、移動体によって収集されたプローブデータに基づいて道路グラフを生成することを目的とする。
【課題を解決するための手段】
【0005】
本開示の実施形態の一態様は、
道路の位置情報を含む第一の地図データを取得することと、道路上を移動する第一の移動体によって測位された、前記第一の移動体の位置情報の集合を含むプローブデータを取得することと、前記第一の地図データを教師データ、前記プローブデータを入力データとして機械学習モデルを学習させることと、前記学習済みの機械学習モデルを用いて、第二の移動体の位置情報の集合を含む第二のプローブデータを、道路の位置情報を含む道路グラフに変換することと、を実行する制御部を有する、情報処理装置である。
【0006】
また、他の態様として、上記の情報処理装置が実行する方法、当該方法をコンピュータに実行させるためのプログラム、または、該プログラムを非一時的に記憶したコンピュータ可読記憶媒体が挙げられる。
【発明の効果】
【0007】
本開示によれば、移動体によって収集されたプローブデータに基づいて道路グラフを生成することができる。
【図面の簡単な説明】
【0008】
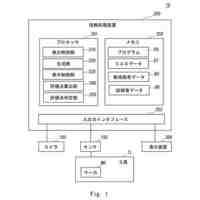
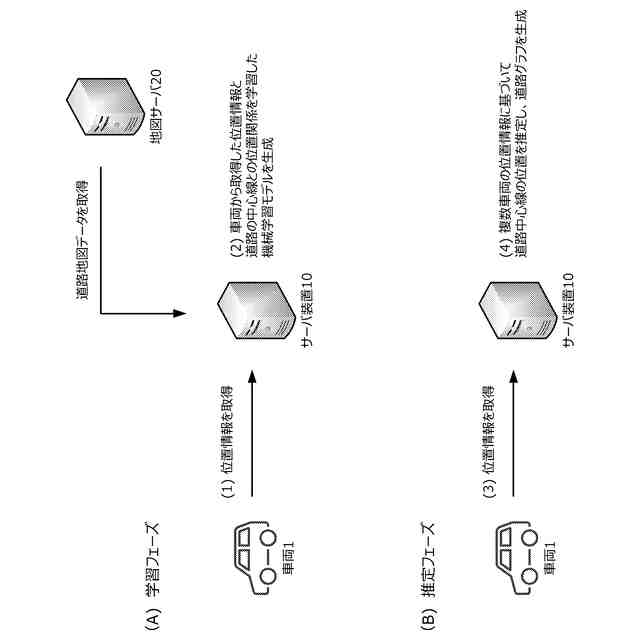
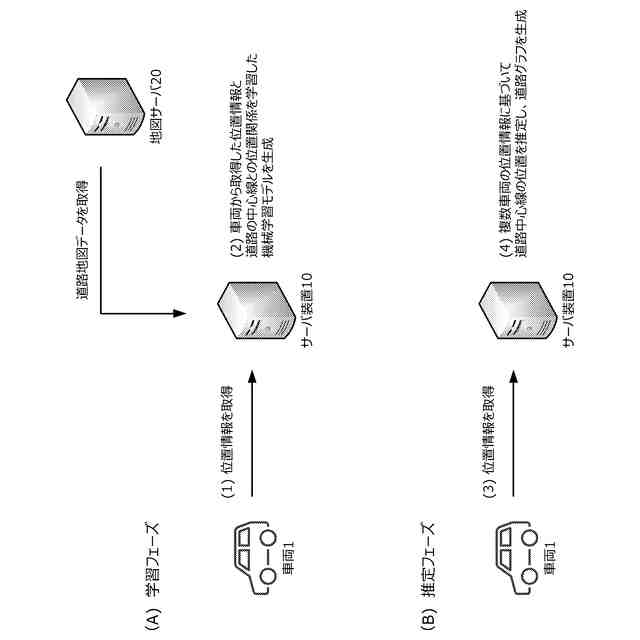
実施形態に係るシステムの概要を説明するための図。
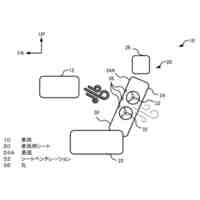
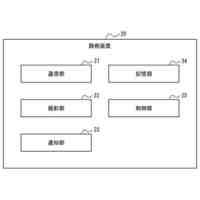
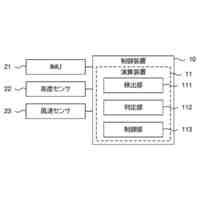
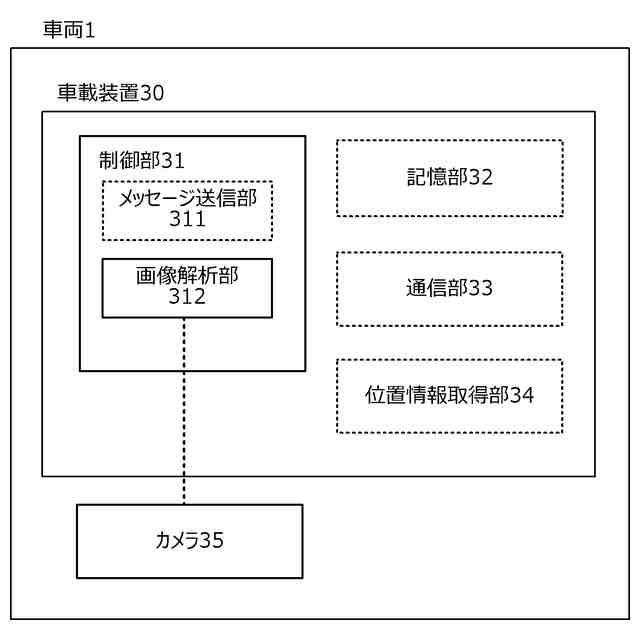
サーバ装置10および車両1の構成を説明する図。
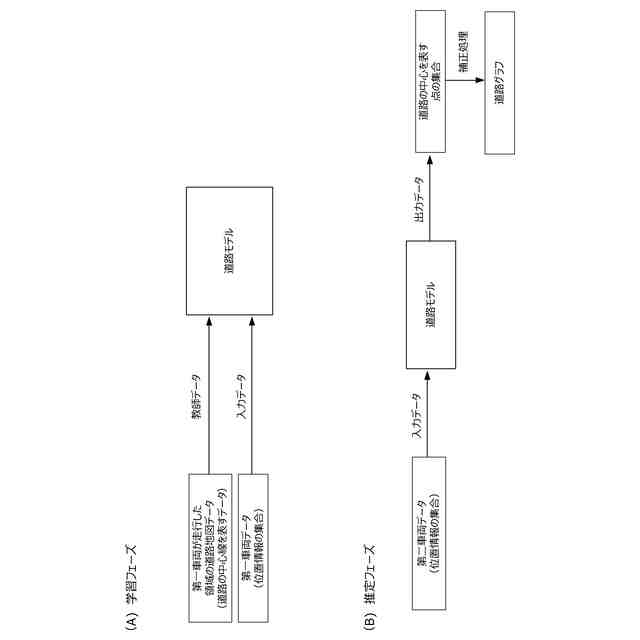
道路モデルに対する入出力を説明する図。
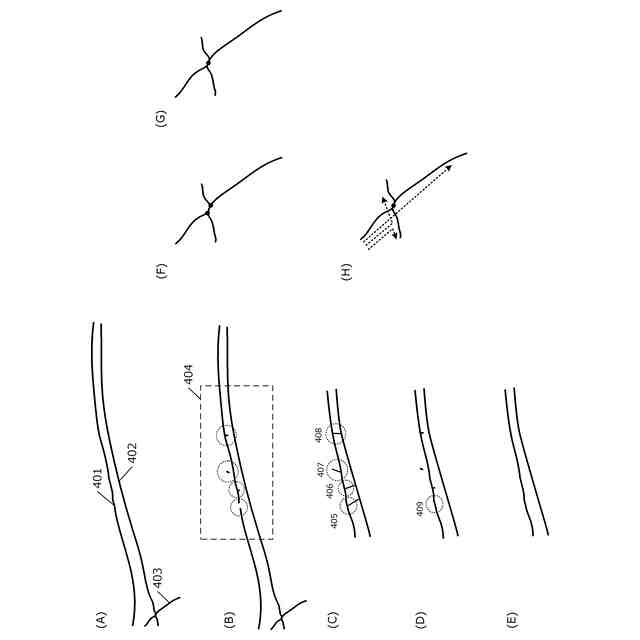
道路モデルの出力から道路グラフを生成する処理の概要図。
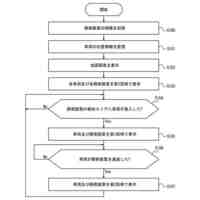
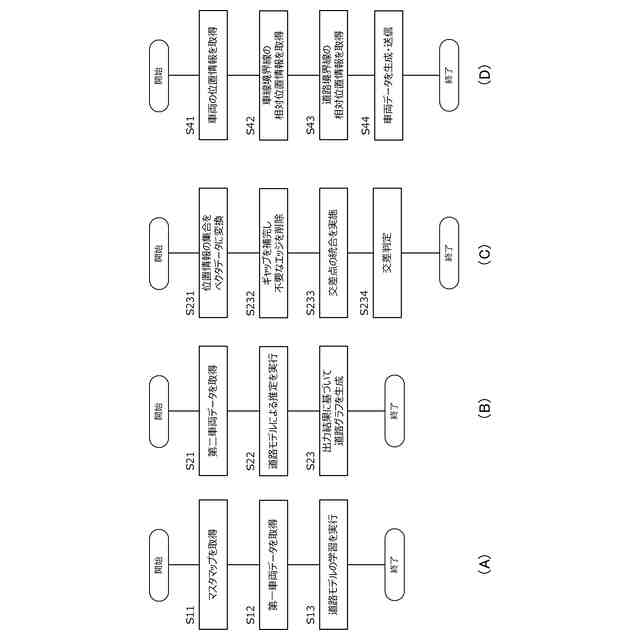
サーバ装置10が実行する処理のフローチャート。
従来技術の問題点を説明する図。
第二の実施形態に係る車両1の構成を説明する図。
道路境界線および車線境界線の検出処理を説明する図。
第二の実施形態における、道路モデルに対する入出力を説明する図。
【発明を実施するための形態】
【0009】
高精度な道路地図データを生成するため、車両によって収集されたプローブデータを利用しようという試みがある。例えば、複数の車両から周期的に位置情報を収集し、収集した位置情報に基づいて、道路が存在する場所を推定することができる。かかる構成によると、例えば、新規に開通した道路がある場合に、車両メーカーは、地図提供会社によるデータ更新を待つことなく、走行可能な道路リンクが増えたことをいち早く把握することができる。
【0010】
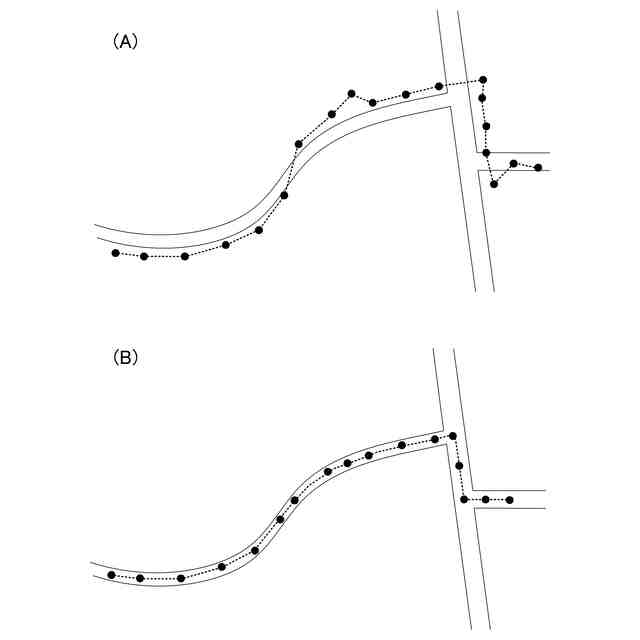
一方、車両によって収集されたプローブデータを利用する場合、データの精度が問題となる。例えば、車両に搭載されたGPSモジュールには、数メートル程度の誤差があるため、データをそのまま利用すると、道路領域を正しく判定することができない場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
膜体
4日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
充電器
16日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
移動体
18日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
コネクタ
4日前
トヨタ自動車株式会社
路側装置
16日前
トヨタ自動車株式会社
充電設備
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
燃料電池
16日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
車両構造
1日前
トヨタ自動車株式会社
電極触媒
17日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
評価方法
4日前
トヨタ自動車株式会社
充電方法
16日前
トヨタ自動車株式会社
電池パック
17日前
トヨタ自動車株式会社
電池パック
17日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
電気自動車
17日前
トヨタ自動車株式会社
電気自動車
17日前
トヨタ自動車株式会社
セパレータ
4日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
電池パック
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ