TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117600
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012394
出願日
2024-01-31
発明の名称
作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250805BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】より適切な作業を行いやすい作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両を提供する。
【解決手段】作業車両の制御方法は、作業機を着脱可能な作業車両の制御方法であって、作業機に対応付けて設定されている自動走行情報に基づいて、作業車両を自動走行させることと、複数の候補情報の中からユーザに自動走行情報を選択させることと、複数の候補情報のうち、作業車両に装着されている作業機の種類に対応しない非対応情報について選択を牽制することと、を有する。
【選択図】図20
特許請求の範囲
【請求項1】
作業機を着脱可能な作業車両の制御方法であって、
前記作業機に対応付けて設定されている自動走行情報に基づいて、前記作業車両を自動走行させることと、
複数の候補情報の中からユーザに前記自動走行情報を選択させることと、
前記複数の候補情報のうち、前記作業車両に装着されている前記作業機の種類に対応しない非対応情報について選択を牽制することと、を有する、
作業車両の制御方法。
続きを表示(約 1,000 文字)
【請求項2】
前記自動走行情報は、目標経路を含む、
請求項1に記載の作業車両の制御方法。
【請求項3】
前記非対応情報の選択が牽制される場合、前記非対応情報が前記作業車両に装着されている前記作業機の種類に対応しない旨を報知すること、を更に有する、
請求項1又は2に記載の作業車両の制御方法。
【請求項4】
前記自動走行情報を選択させるに際して前記複数の候補情報を選択画面に表示させ、
前記選択画面は、前記非対応情報を含む、
請求項1又は2に記載の作業車両の制御方法。
【請求項5】
選択された前記自動走行情報に対応する前記作業機の種類を提示すること、を更に有する、
請求項1又は2に記載の作業車両の制御方法。
【請求項6】
前記自動走行情報の選択から自動走行の開始までの間に、前記作業車両に装着されている前記作業機が付け替えられた場合、付け替え後の前記作業機の種類が選択中の前記自動走行情報に対応していなければ、自動走行の開始を牽制すること、を更に有する、
請求項1又は2に記載の作業車両の制御方法。
【請求項7】
前記自動走行の開始が牽制される場合、前記複数の候補情報の中からユーザに前記自動走行情報を再度、選択させる、
請求項6に記載の作業車両の制御方法。
【請求項8】
前記自動走行の開始が牽制される場合、前記自動走行情報が前記作業車両に装着されている前記作業機の種類に対応しない旨を報知すること、を更に有する、
請求項6に記載の作業車両の制御方法。
【請求項9】
請求項1又は2に記載の作業車両の制御方法を、
1以上のプロセッサに実行させるための作業車両制御プログラム。
【請求項10】
作業機を着脱可能な作業車両の制御に用いられ、
前記作業機に対応付けて設定されている自動走行情報に基づいて、前記作業車両を自動走行させる走行処理部と、
複数の候補情報の中からユーザに前記自動走行情報を選択させる選択処理部と、
前記複数の候補情報のうち、前記作業車両に装着されている前記作業機の種類に対応しない非対応情報について選択を牽制する選択牽制処理部と、を備える、
作業車両制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機にて作業を行う作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
関連技術として、作業地において目標経路に従って作業車両を自動走行させる作業車両制御システム(自動走行システム)が提案されている(例えば、特許文献1参照)。関連技術に係る作業車両制御システムによれば、作業車両は、作業地において複数列に配置された作業対象物に対して所定の作業を行いながら所定の列順序で自動走行する。作業車両は、所定の作業として、圃場(作業地)に植えられた作業対象物に薬液又は水等の散布物を散布する散布作業を行う。
【0003】
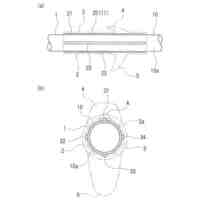
上記関連技術では、作業車両に搭載された障害物検出装置は、作業車両の機体(車体)の前方左側に設けられたライダーセンサと、機体の前方右側に設けられたライダーセンサと、を有する。作業車両制御システムは、障害物検出装置から取得する障害物に関する測定情報に基づいて、作業車両が障害物に衝突する可能性がある場合に障害物を回避する回避処理を実行する。
【先行技術文献】
【特許文献】
【0004】
特開2022-183962号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記関連技術においては、作業車両に装着される作業機が別の作業機に付け替えられた場合に、付け替え後の作業機に合わせた目標経路等に従って作業車両を自動走行させることが必要になるところ、例えば、作業機が付け替えられていることにオペレータが気付かず自動走行を行う可能性がある。その場合、作業車両によって適切な作業を行えない場合がある。
【0006】
本発明の目的は、より適切な作業を行いやすい作業車両の制御方法、作業車両制御プログラム、作業車両制御システム及び作業車両を提供することにある。
【課題を解決するための手段】
【0007】
本発明の一の局面に係る作業車両の制御方法は、作業機を着脱可能な作業車両の制御方法であって、前記作業機に対応付けて設定されている自動走行情報に基づいて、前記作業車両を自動走行させることと、複数の候補情報の中からユーザに前記自動走行情報を選択させることと、前記複数の候補情報のうち、前記作業車両に装着されている前記作業機の種類に対応しない非対応情報について選択を牽制することと、を有する。
【0008】
本発明の一の局面に係る作業車両制御プログラムは、前記作業車両の制御方法を、1以上のプロセッサに実行させるための作業車両制御プログラムである。
【0009】
本発明の一の局面に係る作業車両制御システムは、作業機を着脱可能な作業車両の制御に用いられ、走行処理部と、選択処理部と、選択牽制処理部と、を備える。前記走行処理部は、前記作業機に対応付けて設定されている自動走行情報に基づいて、前記作業車両を自動走行させる。前記選択処理部は、複数の候補情報の中からユーザに前記自動走行情報を選択させる。前記選択牽制処理部は、前記複数の候補情報のうち、前記作業車両に装着されている前記作業機の種類に対応しない非対応情報について選択を牽制する。
【0010】
本発明の一の局面に係る作業車両は、前記作業車両制御システムと、前記作業機を着脱可能な機体と、を備える。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ルアー
19日前
個人
播種装置
16日前
個人
虫の生け捕り具
4日前
個人
プランターセット
23日前
個人
養殖システム
11日前
個人
生命力近親交配方法
23日前
個人
獣捕獲罠装置
26日前
井関農機株式会社
作業車両
9日前
個人
ペット用オムツカバー
1か月前
株式会社アテックス
草刈機
1か月前
株式会社シマノ
釣竿
12日前
株式会社シマノ
釣竿
1か月前
岡部株式会社
浮魚礁
4日前
個人
植物栽培装置
1か月前
井関農機株式会社
収穫作業車両
5日前
中国電力株式会社
巣撤去具
2日前
個人
漁業支援装置及び方法
17日前
ウエダ産業株式会社
切断装置
12日前
株式会社フルトン
水中捕捉装置
1か月前
個人
害虫捕獲、解放及び駆除装置
26日前
鹿島建設株式会社
レインガーデン
20日前
個人
落口枡用取付部材及び落口枡
20日前
第一衛材株式会社
ペット用おむつ
2日前
OTIS株式会社
ルアー用スカート
16日前
株式会社ササキコーポレーション
農作業機
18日前
個人
ペット搬送用バッグの開放部カバー
1か月前
株式会社クボタ
圃場作業機
11日前
株式会社クボタ
水田作業機
23日前
株式会社和コーポレーション
肥料散布機
1か月前
有限会社小阪組
切り株処理方法及び積層体
27日前
株式会社トクイテン
青果物収穫装置
5日前
株式会社タカミヤ
台車用レール構造
17日前
株式会社シマノ
ルアー
1か月前
株式会社Personal AI
反射光拡散装置
23日前
株式会社シマノ
ルアー
18日前
浙江家楽蜜園藝科技有限公司
水稲の栽培方法
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ