TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025120224
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2025091685,2024080906
出願日
2025-06-02,2021-02-16
発明の名称
自動走行方法及び自動走行システム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250807BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
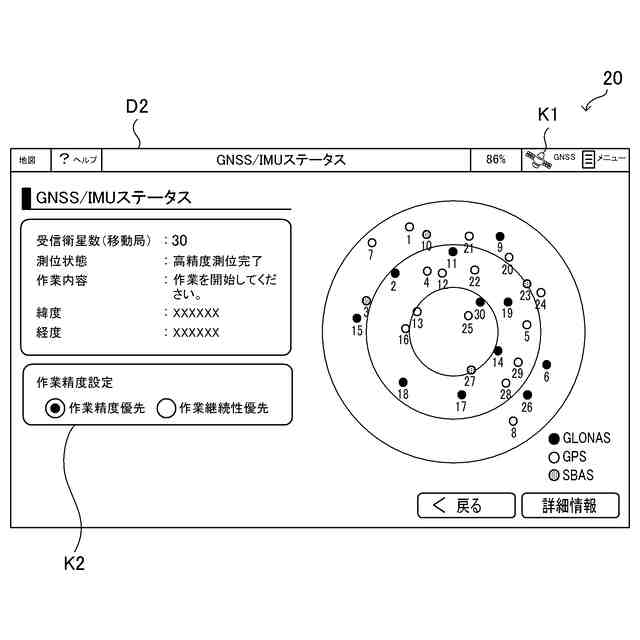
【課題】自動走行可能な作業車両による作業効率の低下及び作業精度の低下を防ぐことが可能な自動走行方法及び自動走行システムを提供すること。
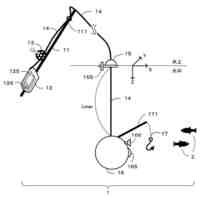
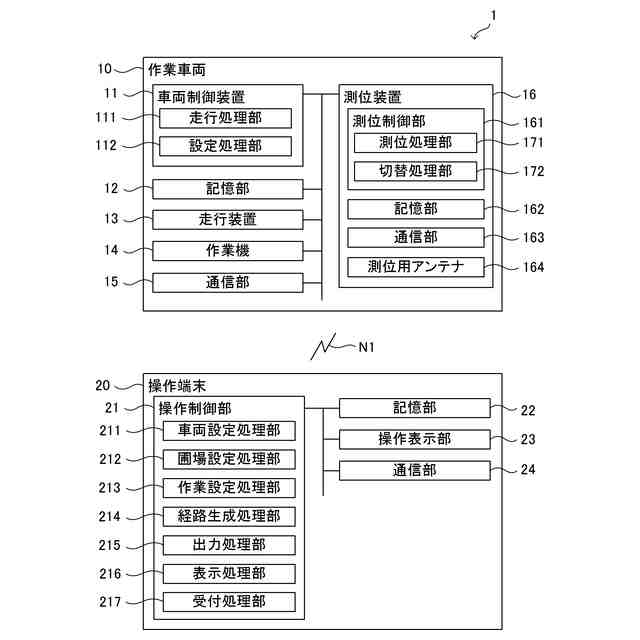
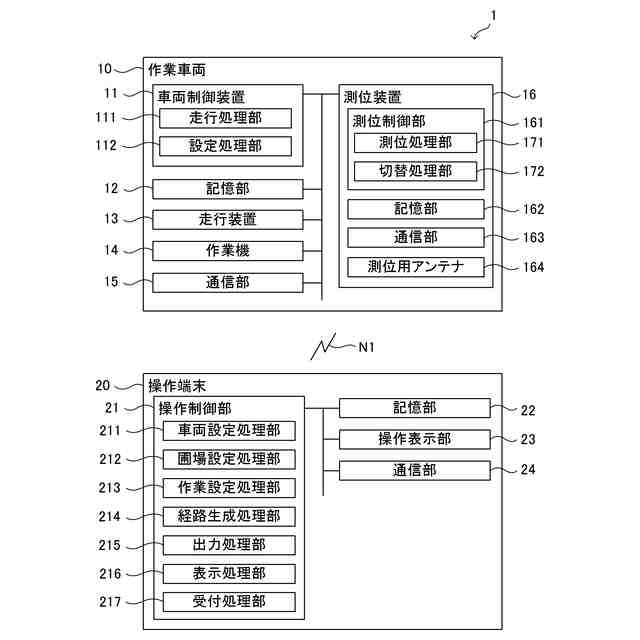
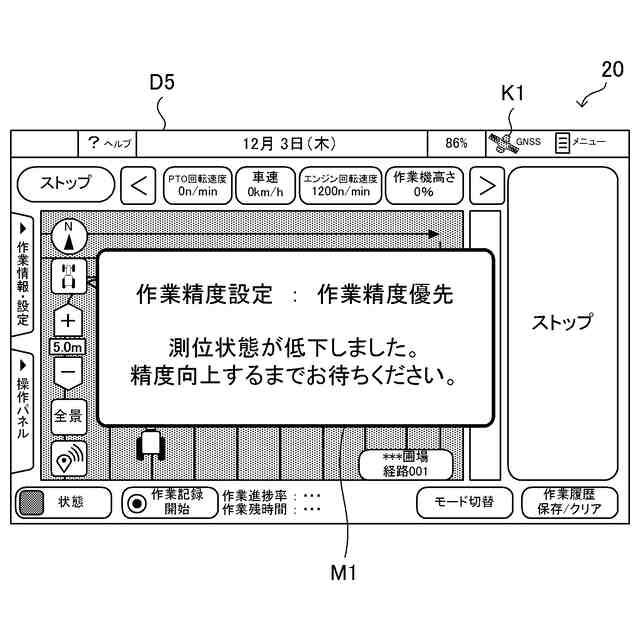
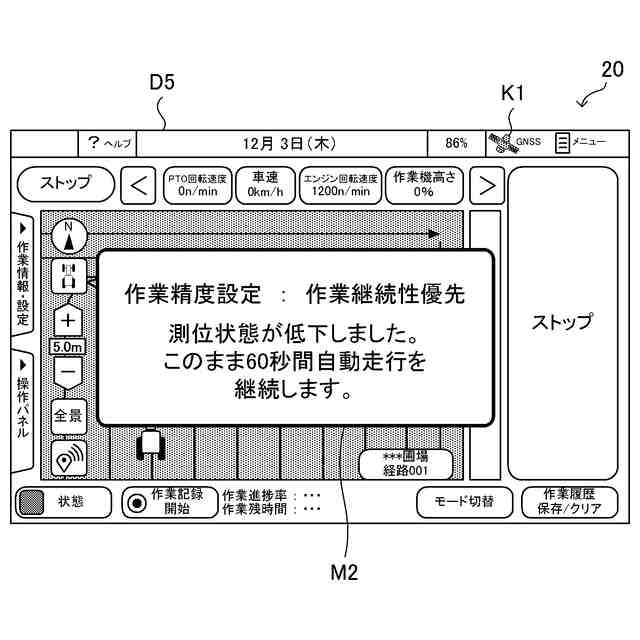
【解決手段】走行処理部111は、作業車両10の位置情報に基づいて作業車両10を自動走行させる。設定処理部112は、作業車両10の作業モードを、測位状態が所定状態から低下した際に作業車両10の自動走行を停止させる作業精度優先(第1作業モード)、及び、測位状態が所定状態から低下した際に作業精度優先の場合よりも作業車両10の自動走行を継続させた後に停止させる作業継続性優先(第2作業モード)のうちいずれかに設定する。
【選択図】図1
特許請求の範囲
【請求項1】
測位される作業車両の位置を示す位置情報に基づいて前記作業車両を自動走行させることと、
前記作業車両の作業モードを、測位状態が所定状態から低下した際に前記作業車両の自動走行を停止させる第1作業モード、及び、測位状態が前記所定状態から低下した際に前記第1作業モードの場合よりも前記作業車両の自動走行を継続させた後に停止させる第2作業モードのうちいずれかに設定することと、
を実行する自動走行方法。
続きを表示(約 590 文字)
【請求項2】
前記第2作業モードにおいて、測位状態が前記所定状態から低下した際に、前記第1作業モードにおいて測位状態が前記所定状態から低下してから前記作業車両の自動走行が停止するまでの時間よりも長い時間が経過した後に前記作業車両の自動走行を停止させる、
請求項1に記載の自動走行方法。
【請求項3】
前記第2作業モードにおいて、測位状態が前記所定状態から低下してから所定時間が経過する前に測位状態が前記所定状態に回復した場合に、前記作業車両の自動走行を停止させない、
請求項1又は2に記載の自動走行方法。
【請求項4】
オペレータよる選択操作に基づいて前記第1作業モード及び前記第2作業モードのいずれかに設定する、
請求項1~3のいずれかに記載の自動走行方法。
【請求項5】
測位される作業車両の位置を示す位置情報に基づいて前記作業車両を自動走行させる走行処理部と、
前記作業車両の作業モードを、測位状態が所定状態から低下した際に前記作業車両の自動走行を停止させる第1作業モード、及び、測位状態が前記所定状態から低下した際に前記第1作業モードの場合よりも前記作業車両の自動走行を継続させた後に停止させる第2作業モードのうちいずれかに設定する設定処理部と、
を備える自動走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を自動走行させる自動走行方法及び自動走行システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
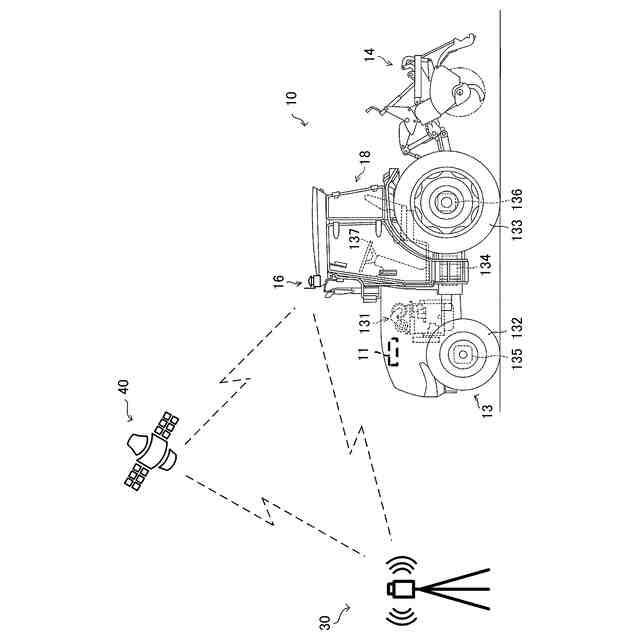
トラクタなどの作業車両を高精度に測位することが可能なリアルタイムキネマティック方式(RTK-GPS測位方式、以下「RTK方式」という。)が知られている。RTK方式によれば、作業車両を高精度に自動走行させることが可能になる。
【0003】
ここで、作業車両の近くに防風林、建物などの障害物が存在する場合、衛星からの電波を受信できなかったり、電波の干渉などにより所定数の衛星から電波を受信できなかったりすることにより測位障害が生じる場合がある。前記測位障害が発生すると、作業車両は自動走行を停止するため作業効率が低下する問題が生じる。
【0004】
従来、前記測位障害が発生した場合に、作業車両を慣性航法により自動走行させることにより、作業車両の停止を回避するシステムが提案されている(例えば特許文献1参照)。このシステムによれば、作業効率の低下を防ぐことができる。
【先行技術文献】
【特許文献】
【0005】
国際公開第2015/147111号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、前記従来の技術では、前記測位障害が発生した場合に一律に慣性航法により作業車両の自動走行を継続させるため、慣性航法により自動走行した経路の作業精度が低下する問題が生じる。例えば、作業車両の高い位置精度が要求される作業(例えば播種作業)の場合、位置精度が低下すると作業精度も低下してしまう。一方、前記測位障害が発生した場合に一律に作業車両を停止させると作業効率が低下する問題が生じる。
【0007】
本発明の目的は、自動走行可能な作業車両による作業効率の低下及び作業精度の低下を防ぐことが可能な自動走行方法及び自動走行システムを提供することにある。
【課題を解決するための手段】
【0008】
本発明に係る自動走行方法は、測位される作業車両の位置を示す位置情報に基づいて前記作業車両を自動走行させることと、前記作業車両の作業モードを、測位状態が所定状態から低下した際に前記作業車両の自動走行を停止させる第1作業モード、及び、測位状態が前記所定状態から低下した際に前記第1作業モードの場合よりも前記作業車両の自動走行を継続させた後に停止させる第2作業モードのうちいずれかに設定することと、を実行する方法である。
【0009】
本発明に係る自動走行システムは、走行処理部と設定処理部とを備える。前記走行処理部は、測位される作業車両の位置を示す位置情報に基づいて前記作業車両を自動走行させる。前記設定処理部は、前記作業車両の作業モードを、測位状態が所定状態から低下した際に前記作業車両の自動走行を停止させる第1作業モード、及び、測位状態が前記所定状態から低下した際に前記第1作業モードの場合よりも前記作業車両の自動走行を継続させた後に停止させる第2作業モードのうちいずれかに設定する。
【発明の効果】
【0010】
本発明によれば、自動走行可能な作業車両による作業効率の低下及び作業精度の低下を防ぐことが可能な自動走行方法及び自動走行システムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ルアー
18日前
個人
播種装置
15日前
個人
虫の生け捕り具
3日前
個人
プランターセット
22日前
個人
生命力近親交配方法
22日前
個人
養殖システム
10日前
個人
獣捕獲罠装置
25日前
株式会社アテックス
草刈機
1か月前
個人
ペット用オムツカバー
29日前
株式会社シマノ
釣竿
11日前
株式会社シマノ
釣竿
29日前
井関農機株式会社
作業車両
8日前
岡部株式会社
浮魚礁
3日前
井関農機株式会社
収穫作業車両
4日前
個人
漁業支援装置及び方法
16日前
中国電力株式会社
巣撤去具
1日前
ウエダ産業株式会社
切断装置
11日前
株式会社フルトン
水中捕捉装置
1か月前
第一衛材株式会社
ペット用おむつ
1日前
鹿島建設株式会社
レインガーデン
19日前
個人
害虫捕獲、解放及び駆除装置
25日前
個人
落口枡用取付部材及び落口枡
19日前
株式会社ササキコーポレーション
農作業機
17日前
OTIS株式会社
ルアー用スカート
15日前
株式会社クボタ
水田作業機
22日前
株式会社クボタ
圃場作業機
10日前
株式会社和コーポレーション
肥料散布機
29日前
個人
ペット搬送用バッグの開放部カバー
1か月前
株式会社シマノ
ルアー
1か月前
株式会社シマノ
ルアー
17日前
株式会社タカミヤ
台車用レール構造
16日前
株式会社トクイテン
青果物収穫装置
4日前
有限会社小阪組
切り株処理方法及び積層体
26日前
株式会社Personal AI
反射光拡散装置
22日前
グローブライド株式会社
魚釣用リール
24日前
浙江家楽蜜園藝科技有限公司
水稲の栽培方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ