TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025133462
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031429
出願日
2024-03-01
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/10 20060101AFI20250904BHJP(車両一般)
要約
【課題】操舵支援の終了時において、車両の横速度を短時間で目標横速度に収束させることができる。
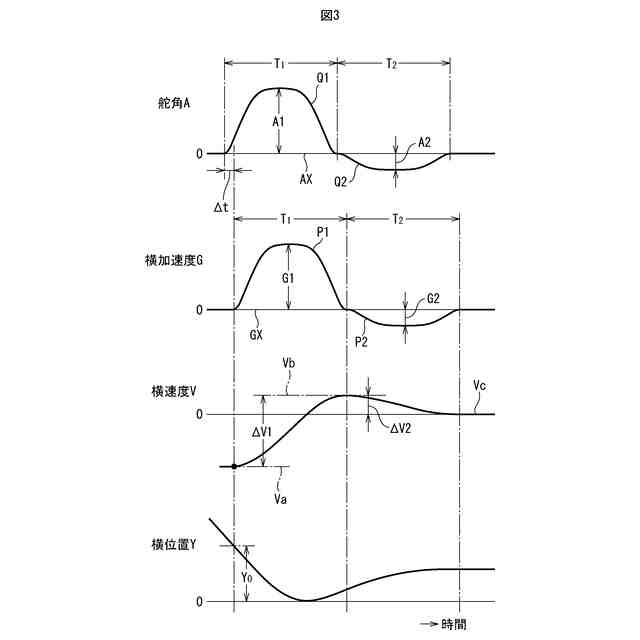
【解決手段】車線逸脱を回避するための舵角の時間的変化パターンを示す舵角プロファイル(Q1、Q2)に従って舵角が制御される。舵角プロファイル(Q1、Q2)が、車線逸脱方向に向かう車両(1)を車線逸脱回避方向に向かわせる第1舵角プロファイル(Q1)と、第1舵角プロファイルに連続した第2舵角プロファイル(Q2)から構成され、第1舵角プロファイル(Q1)における操舵初期時の舵角の変化率、第1舵角プロファイルにおける操舵終了時の舵角および舵角の変化率、第2舵角プロファイル(Q2)における操舵初期時の舵角および舵角の変化率、および、第2舵角プロファイルにおける操舵終了時の舵角および舵角の変化率が零にされる。
【選択図】図3
特許請求の範囲
【請求項1】
車両の舵角の操舵支援を行う操舵装置と、車両の横位置、車両の横速度および車両の横加速度を検出可能なセンサと、プロセッサとを具備し、
該プロセッサは、車線逸脱を回避するための舵角の時間的変化パターンを示す舵角プロファイルに追従して舵角を制御する操舵支援を行い、
該舵角プロファイルが、第1舵角プロファイルと、第1舵角プロファイルに連続していて第1舵角プロファイルとは反対側に舵角を変化させる第2舵角プロファイルから構成されており、
該第1舵角プロファイルにおける操舵初期時の舵角の変化率、該第1舵角プロファイルにおける操舵終了時の舵角および舵角の変化率、該第2舵角プロファイルにおける操舵初期時の舵角および舵角の変化率、および、該第2舵角プロファイルにおける操舵終了時の舵角および舵角の変化率を零にした運転支援装置。
続きを表示(約 1,200 文字)
【請求項2】
該第1舵角プロファイルは、車線逸脱方向に向かう車両を車線逸脱回避方向に向かうように舵角を変化させる変化パターンに形成されており、第2舵角プロファイルは、車線逸脱回避方向に向かう車両を車線方向に向かうように第1舵角プロファイルとは反対側に舵角を変化させる変化パターンに形成されている請求項1に記載の運転支援装置。
【請求項3】
該第2舵角プロファイルは、舵角零の基準線に対して第1舵角プロファイルと反対側に位置する変化パターンとされていると共に、第2舵角プロファイルは、舵角零の基準線からの第1舵角プロファイルの高さを第1舵角プロファイルの全体に亘って同一縮小割合でもって縮小した形状を有する請求項1に記載の運転支援装置。
【請求項4】
該第1舵角プロファイルは、第1舵角プロファイルにおける操舵初期時および操舵終了時の中央において、舵角が最大舵角となる変化パターンに形成されている請求項3に記載の運転支援装置。
【請求項5】
該第1舵角プロファイルにおける操舵初期時の車両の横速度と第1舵角プロファイルにおける操舵終了時の車両の横速度との速度差をΔV1とし、該第2舵角プロファイルにおける操舵初期時の車両の横速度と第2舵角プロファイルにおける操舵終了時の車両の目標横速度との速度差をΔV2とすると、該速度差ΔV1に対する該速度差ΔV2の比ΔV2/ΔV1が該同一縮小割合とされ、該比ΔV2/ΔV1が予め設定されている請求項3記載の運転支援装置。
【請求項6】
車線逸脱回避制御が開始されたときに車両の横加速度の時間的変化パターンを示す第1横加速度プロファイルが作成され、該第1横加速度プロファイルから該第2横加速度プロファイルが作成され、該第1横加速度プロファイルから該第1舵角プロファイルが作成され、該第2横加速度プロファイルから該第2舵角プロファイルが作成される請求項1に記載の運転支援装置。
【請求項7】
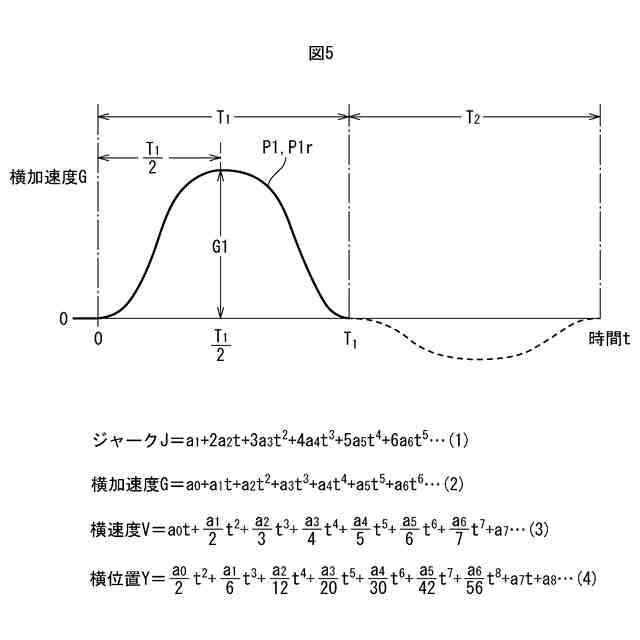
該第1横加速度プロファイルの変化パターンが6次以上の関数で表されている請求項6に記載の運転支援装置。
【請求項8】
車線逸脱回避制御が開始されたときの車両の横加速度が零である場合には、車線逸脱回避制御が開始されたときの車両の横加速度に基づいて作成された該第1横加速度プロファイルから該第2横加速度プロファイルが作成され、車線逸脱回避制御が開始されたときの車両の横加速度が零でない場合には、車線逸脱回避制御が開始されたときの車両の横加速度に基づいて作成された該第1横加速度プロファイルに加えて、車線逸脱回避制御が開始されたときの車両の横加速度が零であるとし作成された別の第1横加速度プロファイルが作成され、この別の第1横加速度プロファイルから該第2横加速度プロファイルが作成される請求項6に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は運転支援装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
車両の車線逸脱を回避するために必要な目標舵角を算出し、舵角を目標舵角にフィードバック制御させるときに必要な操舵力を第1の操舵力として設定し、目標ステア角と車両状態量に基づいて舵角をフィードフォワード制御させるときの操舵力を第2の操舵力として設定し、走行状態に応じて第1の操舵力と第2の操舵力との比率を変化させて目標操舵力を設定し、目標操舵力に基づいて操舵機構に操舵力を付与するようにした車線逸脱防止制御装置か公知である(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2010-36757号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような公知の車線逸脱防止制御装置も含めて、一般的に、車線逸脱防止制御が行われた場合、車線逸脱防止制御の終了時において、例えば、車両の横速度を目標横速度に収束させるまで時間を要するという問題がある。
【課題を解決するための手段】
【0005】
このような問題を解決するために、本発明によれば、車両の舵角の操舵支援を行う操舵装置と、車両の横位置、車両の横速度および車両の横加速度を検出可能なセンサと、プロセッサとを具備し、
このプロセッサは、車線逸脱を回避するための舵角の時間的変化パターンを示す舵角プロファイルに追従して舵角を制御する操舵支援を行い、
舵角プロファイルが、第1舵角プロファイルと、第1舵角プロファイルに連続していて第1舵角プロファイルとは反対側に舵角を変化させる第2舵角プロファイルから構成されており、
第1舵角プロファイルにおける操舵初期時の舵角の変化率、第1舵角プロファイルにおける操舵終了時の舵角および舵角の変化率、第2舵角プロファイルにおける操舵初期時の舵角および舵角の変化率、および、第2舵角プロファイルにおける操舵終了時の舵角および舵角の変化率を零にした運転支援装置が提供される。
【発明の効果】
【0006】
操舵支援の終了時において、車両の横速度を短時間で目標横速度に収束させることができる。
【図面の簡単な説明】
【0007】
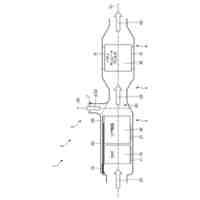
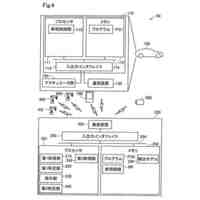
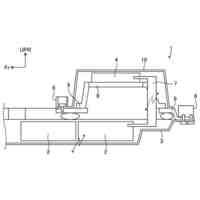
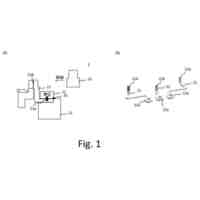
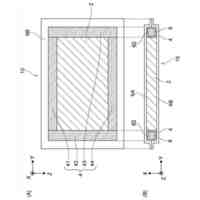
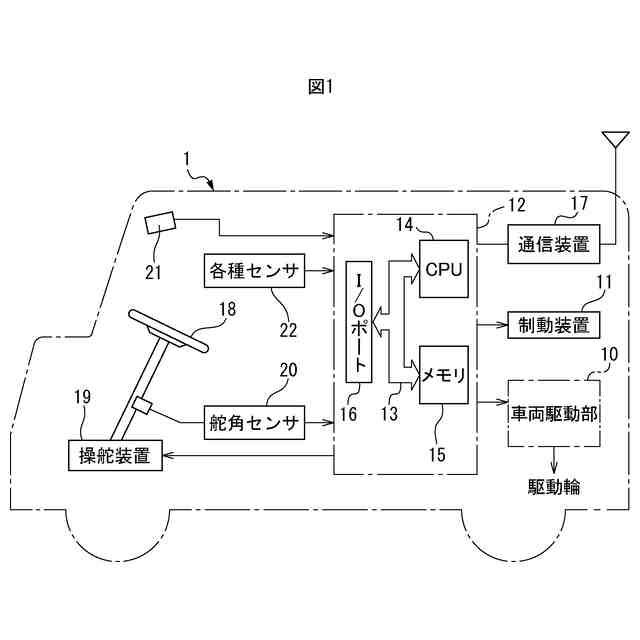
図1は、車両の機能構成を示す図である。
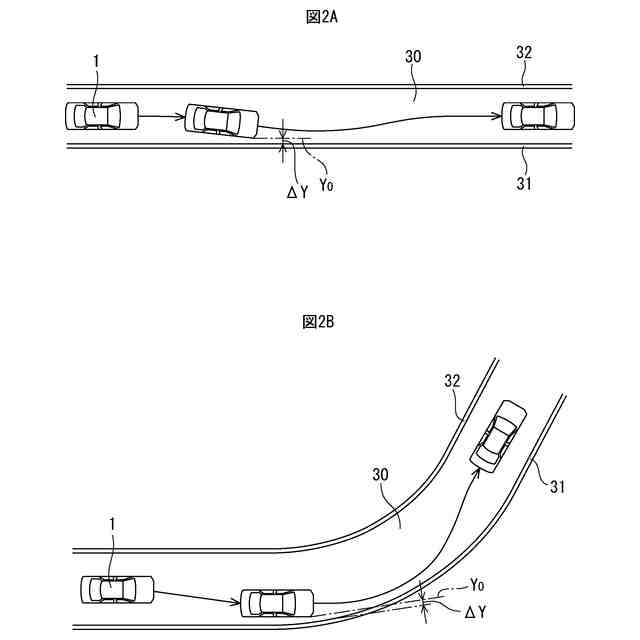
図2Aおよび図2Bは、上方から見たときの車道を示す図である。
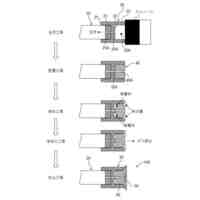
図3は、舵角等の変化を示すタイムチャートである
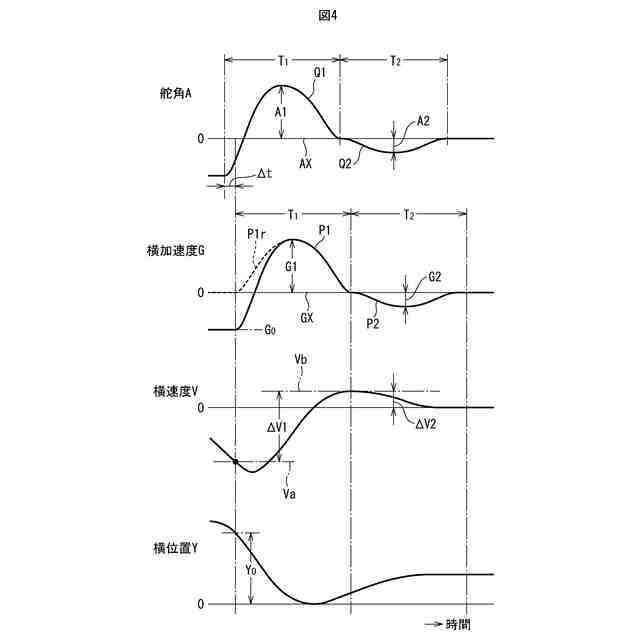
図4は、舵角等の変化を示すタイムチャートである
図5は、計算式を示す図である。
図6A、図6Bおよび図6Cは、夫々、制御時間、最大横加速度および開始位置のマップを示す図である。
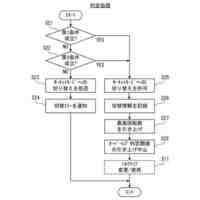
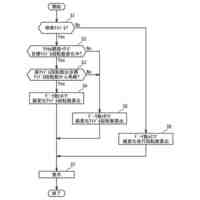
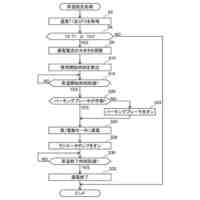
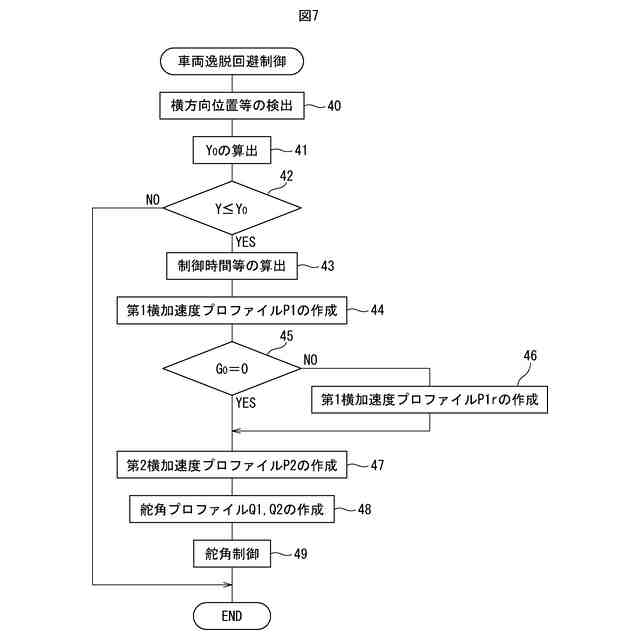
図7は、車線逸脱回避制御を実行するためのフローチャートである。
【発明を実施するための形態】
【0008】
図1は、車両1の機能構成を示している。なお、この車両1は、手動運転および自動運転のいずれの運転も可能である。図1を参照すると、10は車両1の駆動輪に駆動力を与えるための車両駆動部、11は車両1を制動するための制動装置、12は車両1内に搭載された電子制御ユニットを夫々示す。図1に示されるように、電子制御ユニット12はデジタルコンピュータからなり、双方向性バス13によって互いに接続されたCPU(プロセッサ)14、ROMおよびRAMからなるメモリ15および入出力ポート16を具備する。なお、電子制御ユニット12には、外部との通信を行うための通信装置17が接続されている。
【0009】
一方、車両1には、ハンドル18による舵角操作を支援するためにパワーステアリング機構を備えている操舵装置19が設置されている。この操舵装置19は電子制御ユニット12の出力信号により制御され、電子制御ユニット12の出力信号に応じて舵角制御が行われる。また、車両1には、舵角を検出するための舵角センサ20が設置されており、この舵角センサ20の出力信号は電子制御ユニット12に入力される。更に、車両1には、車両1の横位置(横方向の位置)、車両1の横速度(横方向の速度)および車両1の横加速度(横方向の加速度)を検出するためのセンサ21が設置されており、このセンサ21の出力信号は電子制御ユニット12に入力される。図1に示される例では、このセンサ21は、車両1が走行している車線の両側の境界を表す境界線を検出可能な前方カメラからなり、前方カメラ21による撮影画像データに基づいて、境界線からの車両1の横位置、車両1の横速度および車両1の横方速度が算出される。
【0010】
また、車両1には、車両1の状態を検出するセンサおよび車両1の周辺を検出するセンサ等の各種センサ22が設置されている。例えば、車両1の状態を検出するセンサとしては、加速度センサ、速度センサ、方位角センサ、地磁気センサが用いられており、車両1の周辺を検出するセンサとしては、車両1の側方、後方を撮影するカメラ、および、車両1の前方、側方、後方を検知するライダー(LIDAR)、レーダー、クリアランスソナー等が用いられている。一方、図1に示される例では、車両1の車両駆動部10は、2次電池により駆動される電気モータ、或いは、燃料電池により駆動される電気モータより構成されている。電気モータの駆動信号が電子制御ユニット12から出力され、駆動輪は、この電気モータの駆動信号に従って、電気モータにより駆動制御される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
装置
2日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
装置
2日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
負極層
20日前
トヨタ自動車株式会社
溶接装置
6日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
蓄電セル
16日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
液系電池
10日前
トヨタ自動車株式会社
駆動装置
20日前
トヨタ自動車株式会社
路側装置
20日前
トヨタ自動車株式会社
制御装置
17日前
トヨタ自動車株式会社
駆動装置
20日前
トヨタ自動車株式会社
電源装置
3日前
トヨタ自動車株式会社
報知装置
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ