TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139380
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038292
出願日
2024-03-12
発明の名称
ロボット管理システム、情報処理システム、ロボット、管理方法、及び、プログラム
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/648 20240101AFI20250918BHJP(制御;調整)
要約
【課題】ロボットが自走する範囲を変更することができるロボット管理システムを提供する。
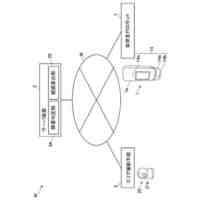
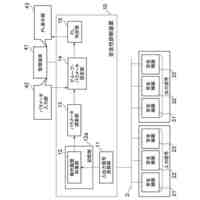
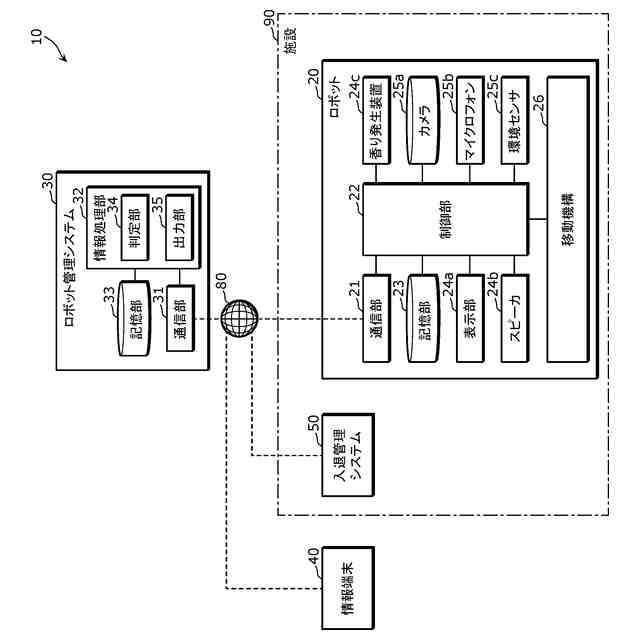
【解決手段】ロボット管理システム30は、各々が施設90内における自走式のロボット20の自走範囲の候補となる複数の候補範囲であって、複数の利用者の利用権限に応じて定められた複数の候補範囲が記憶された記憶部33と、複数の候補範囲の1つを自走範囲として指示するための指示情報を出力する出力部35とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
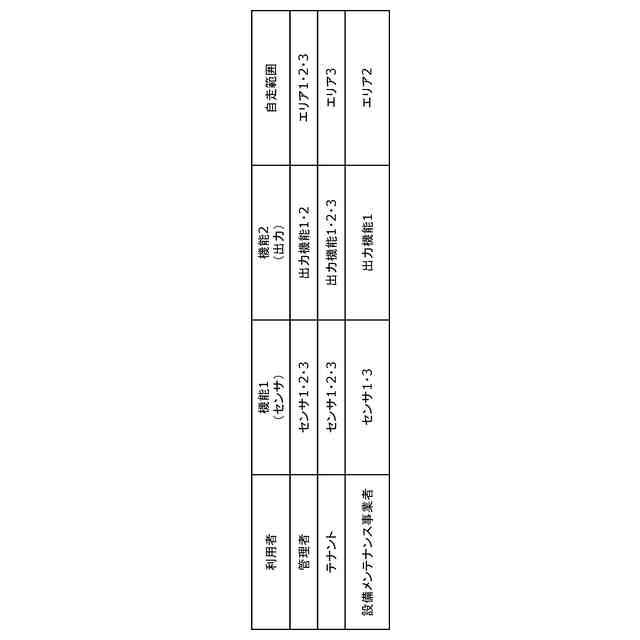
各々が施設内における自走式のロボットの自走範囲の候補となる複数の候補範囲であって、複数の利用者の利用権限に応じて定められた複数の候補範囲が記憶された記憶部と、
前記複数の候補範囲の1つを前記自走範囲として指示するための指示情報を出力する出力部とを備える
ロボット管理システム。
続きを表示(約 1,100 文字)
【請求項2】
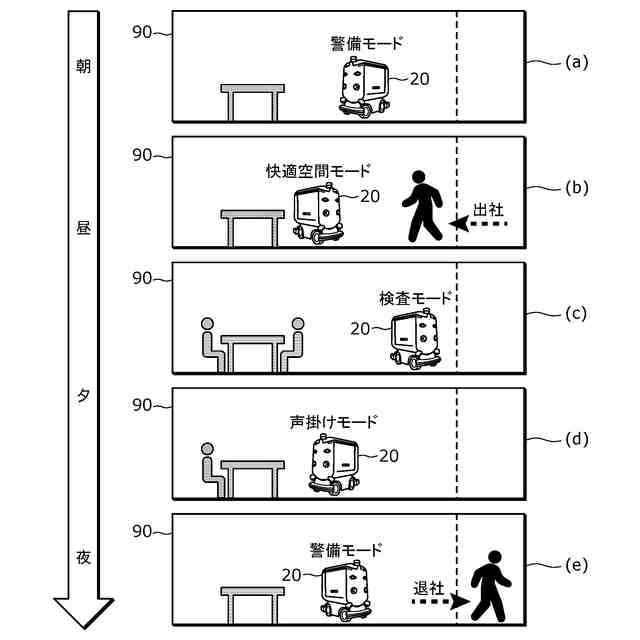
前記出力部は、さらに、前記ロボットが前記指示情報によって指示される前記自走範囲を自走している期間に行う動作を指示する動作指示情報を出力する
請求項1に記載のロボット管理システム。
【請求項3】
前記複数の候補範囲には、前記施設の管理者の利用権限に応じて定められた第1候補範囲と、前記施設のテナントの利用権限に応じて定められた第2候補範囲とが少なくとも含まれる
請求項1または2に記載のロボット管理システム。
【請求項4】
前記記憶部には、前記自走範囲の切り替えタイミングに関する条件が記憶され、
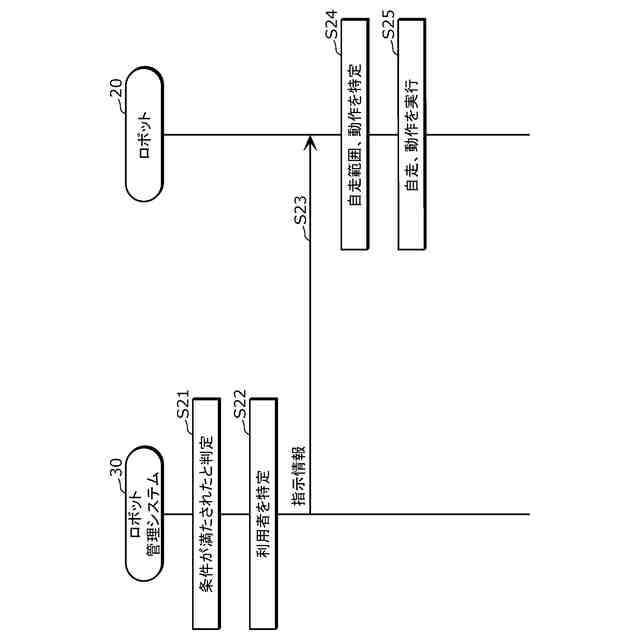
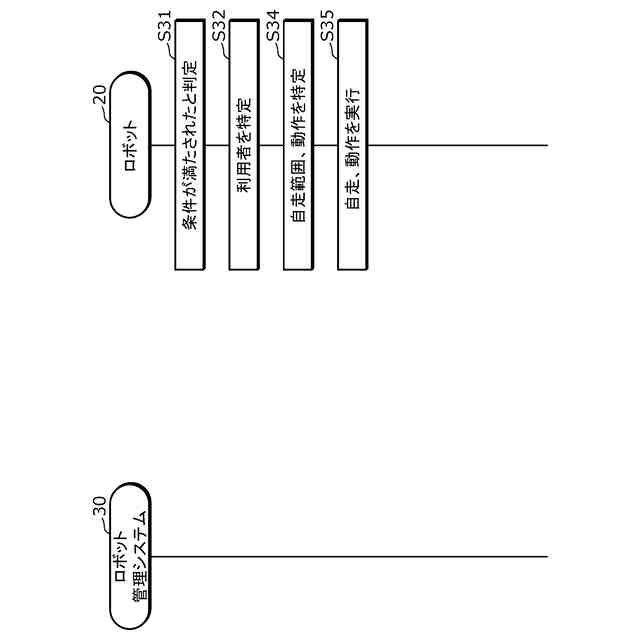
前記ロボット管理システムは、さらに、前記条件が満たされたか否かを判定する判定部を備え、
前記出力部は、前記条件が満たされたと判定されたときに、前記指示情報を出力する
請求項1~3のいずれか1項に記載のロボット管理システム。
【請求項5】
前記条件は、所定の時刻が到来したという条件である
請求項4に記載のロボット管理システム。
【請求項6】
さらに、他のシステムと通信する通信部を備え、
前記条件は、前記通信部が前記他のシステムから所定の情報を受信したという条件である
請求項4に記載のロボット管理システム。
【請求項7】
前記他のシステムは、前記施設に設置された設備に関連する設備システムであり、
前記条件は、前記通信部が前記設備システムから前記所定の情報を受信したという条件である
請求項6に記載のロボット管理システム。
【請求項8】
前記設備システムは、入退管理システムであり、
前記所定の情報は、前記施設内に人がいない状態から人がいる状態に遷移したことを示す第1情報、または、前記施設内に人がいる状態から人がいない状態に遷移したことを示す第2情報である
請求項7に記載のロボット管理システム。
【請求項9】
請求項1~8のいずれか1項に記載のロボット管理システムと、
前記ロボットとを備える
情報処理システム。
【請求項10】
自走式のロボットであって、
請求項1~8のいずれか1項に記載のロボット管理システムと通信することにより前記指示情報を受信する通信部と、
移動機構と、
前記移動機構を制御することにより、前記ロボットに、受信された前記指示情報によって指示される前記自走範囲を自走させる制御部とを備える
ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット管理システム、情報処理システム、ロボット、管理方法、及び、プログラムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
ビルや空港などの施設内を自走して作業を行うロボットが知られている。特許文献1には、セキュリティを確保しながら、施錠されたドアの解錠を行ってロボットを通過させることができるロボット管理システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-107108号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、ロボットが自走する範囲を変更することができるロボット管理システム等を提供する。
【課題を解決するための手段】
【0005】
本発明の一態様に係るロボット管理システムは、各々が施設内における自走式のロボットの自走範囲の候補となる複数の候補範囲であって、複数の利用者の利用権限に応じて定められた複数の候補範囲が記憶された記憶部と、前記複数の候補範囲の1つを前記自走範囲として指示するための指示情報を出力する出力部とを備える。
【0006】
本発明の一態様に係る情報処理システムは、前記ロボット管理システムと、前記ロボットとを備える。
【0007】
本発明の一態様に係るロボットは、自走式のロボットであって、前記ロボット管理システムと通信することにより前記指示情報を受信する通信部と、移動機構と、前記移動機構を制御することにより、前記ロボットに、受信された前記指示情報によって指示される前記自走範囲を自走させる制御部とを備える。
【0008】
本発明の一態様に係る管理方法は、コンピュータシステムによって実行される自走式のロボットの管理方法であって、前記コンピュータシステムは、各々が施設内における前記ロボットの自走範囲の候補となる複数の候補範囲であって、複数の利用者の利用権限に応じて定められた複数の候補範囲が記憶された記憶部にアクセスすることができ、前記管理方法は、前記複数の候補範囲の1つを前記自走範囲として指示するための指示情報を出力する出力ステップを含む。
【0009】
本発明の一態様に係るプログラムは、前記管理方法を前記コンピュータシステムに実行させるためのプログラムである。
【発明の効果】
【0010】
本発明のロボット管理システム等は、ロボットが自走する範囲を変更することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
12日前
株式会社FUJI
加工機械ライン
2か月前
株式会社熊谷組
障害物の検出方法
3日前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
1か月前
新電元工業株式会社
作業用ロボット
1日前
個人
作業車両自動化システム
2か月前
豊田合成株式会社
機器制御装置
8日前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
22日前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン株式会社
配送システム
1か月前
カヤバ株式会社
減圧弁
10日前
トヨタ自動車株式会社
制御装置
12日前
株式会社ダイフク
物品搬送設備
3か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
株式会社ダイフク
物品搬送設備
22日前
マーク ヘイリー
消防ロボット
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
日野自動車株式会社
自動運転装置
2日前
アズビル株式会社
制御システムおよび制御方法
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
株式会社アマダ
工作機械制御装置
2日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
株式会社CAOS
移動体の制御システム
1か月前
株式会社TMEIC
安全性診断装置
16日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ