TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140631
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040156
出願日
2024-03-14
発明の名称
車両制御システム、車両制御プログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
株式会社アドヴィックス
,
株式会社アイシン
,
株式会社ジェイテクト
代理人
弁理士法人ゆうあい特許事務所
主分類
B62D
6/00 20060101AFI20250919BHJP(鉄道以外の路面車両)
要約
【課題】補助装置の追加や車両の改造をすることなく、運転者個々の身体的条件に関わらず、車両のヨー運動の適切な制御を可能とする。
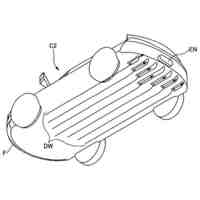
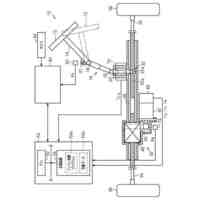
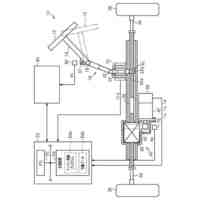
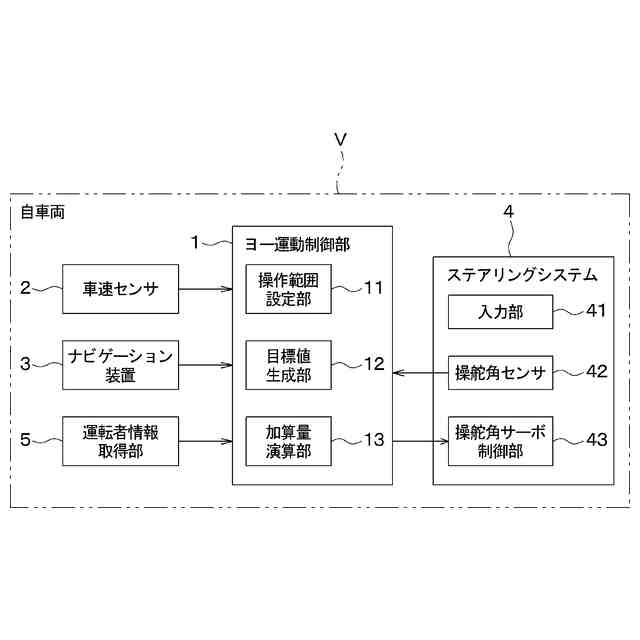
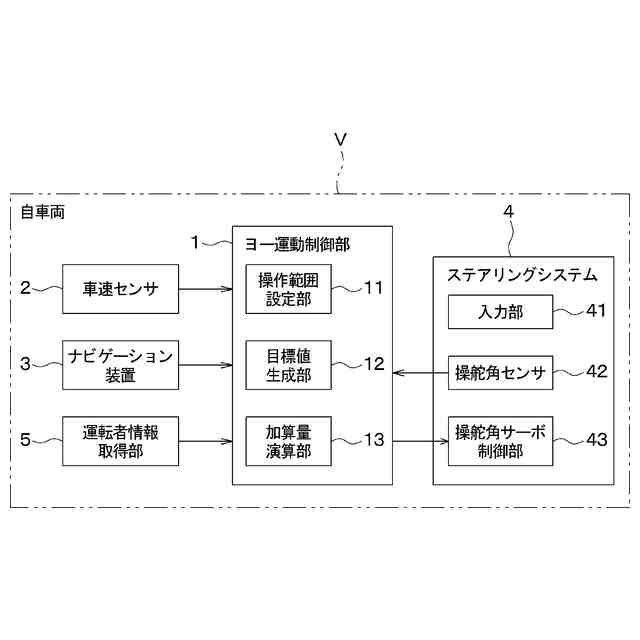
【解決手段】車両制御システムは、自車両Vのステアリング操作に用いられる入力部41の運転者ごとの操作可能範囲を認識し、入力部41の操作量と認識した操作可能範囲に基づいて、ヨー運動を実現させるためのヨー運動目標値を生成する。車両制御システムは、ヨー運動目標値と、実際の操作量と自車両Vの数理モデルにより算出されるヨーレートとに差がある場合、ヨー運動目標値を達成するために操作量に加算する加算量を演算し、ステアリングシステム4に出力する。
【選択図】図1
特許請求の範囲
【請求項1】
自車両(V)のステアリングシステム(4)の入力部(41)の操作により生じる前記自車両のヨー運動を制御する車両制御システムであって、
前記自車両の車速、前記自車両の運転者による前記入力部の操作可能範囲および前記入力部の操作量の情報を取得し、前記操作可能範囲を反映して前記操作量に加算する操作量である加算量を演算し、演算した前記加算量を前記ステアリングシステムに出力するヨー運動制御部(1)を有する、車両制御システム。
続きを表示(約 660 文字)
【請求項2】
前記ヨー運動制御部は、
前記操作可能範囲を設定する操作範囲設定部(11)と、
前記操作量、前記操作可能範囲および前記車速の情報に基づいて、前記自車両のヨー運動を実現するための目標値であるヨー運動目標値を演算する目標値生成部(12)と、
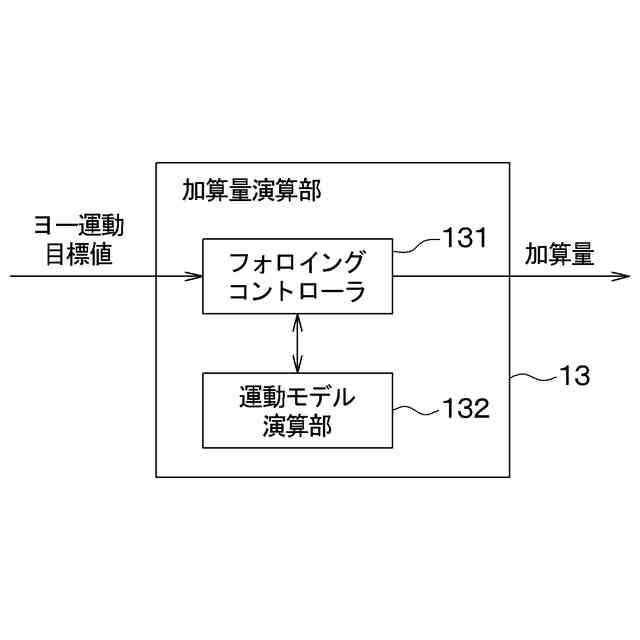
前記操作可能範囲および前記ヨー運動目標値に基づいて、前記加算量の値を演算する加算量演算部(13)と、を有する、請求項1に記載の車両制御システム。
【請求項3】
前記ヨー運動目標値は、前記操作可能範囲の最大値または目標ステアリングギア比に反比例するヨーレートである、請求項2に記載の車両制御システム。
【請求項4】
自車両(V)のステアリングシステム(4)の入力部(41)の操作により生じる前記自車両のヨー運動を制御するヨー運動制御装置(1)により実行される、車両制御プログラムであって、
前記自車両の運転者による前記入力部の操作可能範囲を設定する処理と、
前記ヨー運動制御装置が取得した前記自車両の車速の情報と、前記運転者による前記入力部の操作量の情報と、設定した前記操作可能範囲とに基づいて、前記自車両のヨー運動を実現するための目標値であるヨー運動目標値を演算する処理と、
前記ヨー運動目標値、前記操作可能範囲および前記操作量に基づいて、前記操作量に加算する操作量であって、前記操作量に加えて前記ステアリングシステムに出力される加算量を演算する処理と、を含む、車両制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動車等の車両のヨー運動を制御するために用いられる車両制御システムおよびに車両制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、自動車などの車両において、電気機械的に操舵アクチュエータを制御する車両制御システムが知られている。例えば、特許文献1に記載の車両制御システムは、自動車の少なくとも1つの輪軸について操舵角を電気機械的に調整し、自動車のヨー運動を制御する。
【0003】
なお、ヨー運動とは、車両の走行中における運転者のステアリング操作により生じる、鉛直方向を軸とする車両の回転運動であり、「ヨー」、「ヨーイング」あるいは「ヨーイング運動」とも称される。
【先行技術文献】
【特許文献】
【0004】
特許第5911482号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
さて、車両の運転者が上肢の障害や傷病などの諸事情による身体的制約がある者の場合、ステアリングホイールなどのステアリング操作に用いられる入力デバイスの操作量が制限されてしまう。特許文献1に記載の車両制御システムは、運転者の操舵能力に制限がある場合については想定されていないため、このような事態に対応することができない。そこで、身体的制限がある場合に自動車のヨー運動を適切に制御可能とするため、例えば、米国特許第7970514号明細書に記載のもののように、ステアリング操作用の入力デバイス自体を身体的制約に合わせて設計することが考えられる。
【0006】
しかしながら、ステアリング入力デバイス自体を身体的制約に合わせた設計とすると、車両のコックピットを改造する必要があり、運転者に身体的制約がない者である場合のコックピットとの共通化が難しくなってしまう。
【0007】
本開示は、上記の点に鑑み、補助装置の追加や車両の改造をすることなく、運転者個々の身体的な条件に関わらず、車両のヨー運動の適切な制御を可能とする車両制御システムおよび車両制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
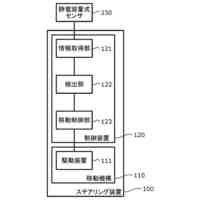
本開示の1つの観点によれば、車両制御システムは、
自車両(V)のステアリングシステム(4)の入力部(41)の操作により生じる自車両のヨー運動を制御する車両制御システムであって、
自車両の車速、自車両の運転者による入力部の操作可能範囲および入力部の操作量の情報を取得し、前操作可能範囲を反映して操作量に加算する操作量である加算量を演算し、演算した加算量をステアリングシステムに出力するヨー運動制御部(1)を有する。
【0009】
この車両制御システムは、自車両の車速、運転者によるステアリングシステムの入力部の操作可能範囲および操作量の情報を取得し、操作可能範囲を加味して操作量に加算する加算量を演算し、加算量をステアリングシステムに出力するヨー運動制御部を備える。この車両制御システムは、運転者の操作可能範囲を取得することで、運転者の身体的制約の有無に応じたステアリングシステムの入力部における操作可能量の範囲を特定する。そして、車速、操作可能範囲および操作量に基づいて、操作量に加える加算量を演算し、加算量をステアリングシステムに出力するため、ステアリングシステムには、運転者の操舵能力に応じた加算量が操作量に加えられることとなる。このため、自車両の改造等なしで、運転者の身体的条件に関わらず、自車両のヨー運動の適切な制御が可能な車両制御システムとなる。
【0010】
本開示の別の観点によれば、車両制御プログラムは、
自車両(V)のステアリングシステム(4)の入力部(41)の操作により生じる自車両のヨー運動を制御するヨー運動制御装置(1)により実行される、車両制御プログラムであって、
自車両の運転者による入力部の操作可能範囲を設定する処理と、
ヨー運動制御装置が取得した自車両の車速の情報と、運転者による入力部の操作量の情報と、設定した操作可能範囲とに基づいて、自車両のヨー運動を実現するための目標値であるヨー運動目標値を演算する処理と、
ヨー運動目標値、操作可能範囲および操作量に基づいて、操作量に加算する操作量であって、操作量に加えてステアリングシステムに出力される加算量を演算する処理と、を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
駐輪設備
26日前
個人
ボギー・フレーム
1か月前
個人
ルーフ付きトライク
1か月前
個人
パワーアシスト自転車
1か月前
個人
乗用自動車のディフューザー
5日前
個人
二輪車の三次元折りたたみ機構
1か月前
個人
折り畳み作業机搭載の変型台車
27日前
個人
ハブモーターの配線構造
11日前
個人
自動車のタイヤの位置について
1か月前
豊田鉄工株式会社
車両用カバー
13日前
株式会社カインズ
荷台車
1か月前
ダイハツ工業株式会社
車両構造
1か月前
ダイハツ工業株式会社
車両構造
1か月前
大林道路株式会社
逸走防止装置
25日前
個人
電動スケーター
1日前
大日本印刷株式会社
移動体
11日前
大日本印刷株式会社
移動体
11日前
株式会社クボタ
作業車
1日前
日本プラスト株式会社
ハンドル
1か月前
センターピア株式会社
手押台車
19日前
日本プラスト株式会社
カバー部材
25日前
カワサキモータース株式会社
乗物
1か月前
株式会社ジェイテクト
ステアリング装置
1か月前
株式会社カインズ
ガーデン二輪車
4日前
本田技研工業株式会社
鞍乗型車両
11日前
株式会社ジェイテクト
転舵制御装置
1か月前
株式会社ジェイテクト
転舵制御装置
1か月前
株式会社椿本チエイン
走行ユニット
28日前
船井電機株式会社
物品搬送用自転車
27日前
豊田合成株式会社
車両の前部構造体
1か月前
船井電機株式会社
物品搬送用自転車
27日前
株式会社ジェイテクト
操舵制御装置
1日前
トヨタ自動車株式会社
小型モビリティ
22日前
太陽誘電株式会社
電動アシスト車の制御装置
1か月前
個人
折り畳み式電動スケーター
1か月前
トヨタ自動車株式会社
車両用制御装置
29日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ