TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141459
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041402
出願日
2024-03-15
発明の名称
制御方法およびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの組立精度によらず、ロボットアームを高い位置精度で駆動することができる制御方法およびロボットシステムを提供すること。
【解決手段】第1距離に対応する第1基準データと、第1取得ステップで取得した第1距離と、に基づいて、第1位置誤差を算出するとともに、第2距離に対応する第2基準データと、第2取得ステップで取得した第2距離と、に基づいて、第2位置誤差を算出する算出ステップと、第1位置誤差および第2位置誤差に基づいて、基準姿勢における各関節の回転角度に対する、第1取得ステップおよび第2取得ステップを実行した時点でのロボットアームが基準姿勢をとった場合の各関節の回転角度のズレを取得する誤差情報取得ステップと、を有する制御方法。
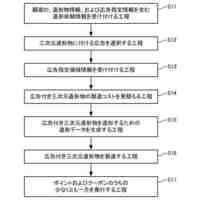
【選択図】図10
特許請求の範囲
【請求項1】
制御点が設定され、アームを回転可能に接続する複数の関節を有し、互いに異なる基準姿勢、第1姿勢および第2姿勢をとり得るロボットアームと、前記ロボットアームの先端部に装着可能である互いの測定軸が直交する3つの距離計と、を備えるロボットシステムの制御方法であって、
前記ロボットアームを前記第1姿勢とし、前記3つの距離計を用いて、前記制御点から測定基準となる球体の中心までの第1距離を取得する第1取得ステップと、
前記ロボットアームを前記第2姿勢とし、前記3つの距離計を用いて、前記制御点から前記球体の中心までの第2距離を取得する第2取得ステップと、
前記第1距離に対応する第1基準データと、前記第1取得ステップで取得した前記第1距離と、に基づいて、第1位置誤差を算出するとともに、前記第2距離に対応する第2基準データと、前記第2取得ステップで取得した前記第2距離と、に基づいて、第2位置誤差を算出する算出ステップと、
前記第1位置誤差および前記第2位置誤差に基づいて、前記基準姿勢における各前記関節の回転角度に対する、前記第1取得ステップおよび前記第2取得ステップを実行した時点での前記ロボットアームが前記基準姿勢をとった場合の各前記関節の回転角度のズレを取得する誤差情報取得ステップと、を有することを特徴とする制御方法。
続きを表示(約 1,100 文字)
【請求項2】
前記第1姿勢は、前記基準姿勢から第1方向に前記ロボットアームを傾けた姿勢であり、
前記第2姿勢は、前記基準姿勢から前記第1方向と反対方向の第2方向に前記ロボットアームを傾けた姿勢である請求項1に記載の制御方法。
【請求項3】
前記誤差情報取得ステップで取得した各前記関節の回転角度のズレに基づいて、前記ロボットアームの動作設定を調整する調整ステップを有する請求項1または2に記載の制御方法。
【請求項4】
制御点が設定され、アームを回転可能に接続する複数の関節を有し、互いに異なる基準姿勢、第1姿勢および第2姿勢をとり得るロボットアーム、および前記ロボットアームの先端部に設けられ、互いの測定軸が直交する3つの距離計を備えるロボットと、前記ロボットアームの作動を制御するとともに各前記距離計と接続された制御部と、を備え、
前記制御部は、
前記ロボットアームを前記第1姿勢とし、前記3つの距離計を用いて、前記制御点から測定基準となる球体の中心までの第1距離を取得する第1取得ステップと、
前記ロボットアームを前記第2姿勢とし、前記3つの距離計を用いて、前記制御点から前記球体の中心までの第2距離を取得する第2取得ステップと、
前記第1距離に対応する第1基準データと、前記第1取得ステップで取得した前記第1距離と、に基づいて、第1位置誤差を算出するとともに、前記第2距離に対応する第2基準データと、前記第2取得ステップで取得した前記第2距離と、に基づいて、第2位置誤差を算出する算出ステップと、
前記第1位置誤差および前記第2位置誤差に基づいて、前記基準姿勢における各前記関節の回転角度に対する、前記第1取得ステップおよび前記第2取得ステップを実行した時点での前記ロボットアームが前記基準姿勢をとった場合の各前記関節の回転角度のズレを取得する誤差情報取得ステップと、を実行することを特徴とするロボットシステム。
【請求項5】
前記ロボットは、垂直多関節ロボットである請求項4に記載のロボットシステム。
【請求項6】
前記3つの距離計のそれぞれの検出軸は、前記ロボットアームの最先端のアームの回転軸からズレた位置で交差している請求項5に記載のロボットシステム。
【請求項7】
前記距離計は、接触式である請求項4ないし6のいずれか1項に記載のロボットシステム。
【請求項8】
前記距離計は、光学式である請求項4ないし6のいずれか1項に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御方法およびロボットシステムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
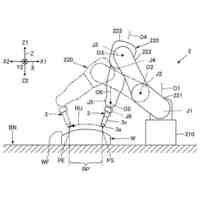
近年、工場では人件費の高騰や人材不足により、ロボットアームを有するロボットによって部品または製品の製造、加工、組み立て、搬送等の作業が行われるようになり、人手で行われてきた作業の自動化が図られている。ロボットアームは、関節を介して回転可能に接続された複数のアームを有する。
【0003】
このようなロボットでは、ロボットアームに基準位置(基準姿勢)が設定されている。基準位置は、各関節の回転角度が所定の角度、すなわち、各アームが所定の位置関係となる状態である。ロボットに基準位置を正確に設定し、作業が完了するごとにロボットアームを基準位置に正確に戻すことにより、次回以降もロボットが高い位置精度を持って、動作を行うことができる。
【0004】
ロボットアームを基準位置に戻すために、特許文献1では、各アームに目印が付してある。この目印を合わせるようにユーザーが各アームの位置の微調整を行うことにより、ロボットアームを基準位置に戻すことができる。
【先行技術文献】
【特許文献】
【0005】
特開平03-121792号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された構成では、ロボットアームを基準位置に戻す作業がユーザーの目視による作業にゆだねられている。このため、ユーザーが手作業で正確な位置合わせを行わないと、ロボットアームを正確に基準位置に戻すことができなかった。その結果、基準位置に戻す作業に手間がかかり、ロボットの位置精度が低下し、ひいては作業精度の低下を招いてしまうおそれがあった。
【課題を解決するための手段】
【0007】
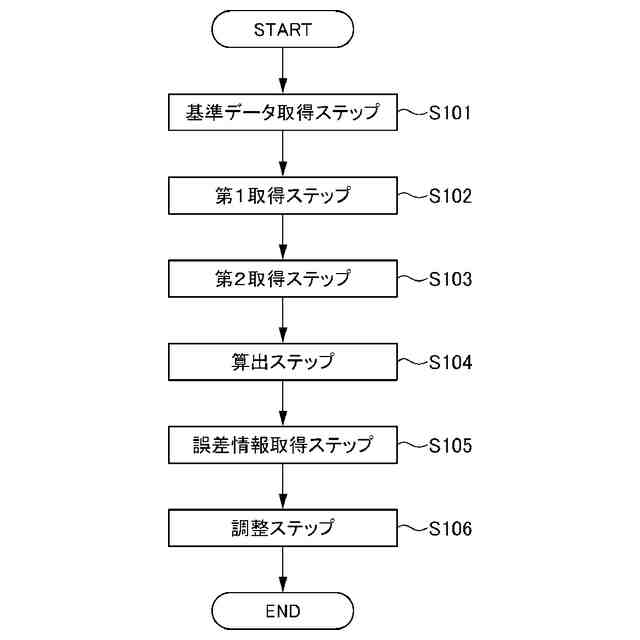
本発明の制御方法は、制御点が設定され、アームを回転可能に接続する複数の関節を有し、互いに異なる基準姿勢、第1姿勢および第2姿勢をとり得るロボットアームと、前記ロボットアームの先端部に装着可能である互いの測定軸が直交する3つの距離計と、を備えるロボットシステムの制御方法であって、
前記ロボットアームを前記第1姿勢とし、前記3つの距離計を用いて、前記制御点から測定基準となる球体の中心までの第1距離を取得する第1取得ステップと、
前記ロボットアームを前記第2姿勢とし、前記3つの距離計を用いて、前記制御点から前記球体の中心までの第2距離を取得する第2取得ステップと、
前記第1距離に対応する第1基準データと、前記第1取得ステップで取得した前記第1距離と、に基づいて、第1位置誤差を算出するとともに、前記第2距離に対応する第2基準データと、前記第2取得ステップで取得した前記第2距離と、に基づいて、第2位置誤差を算出する算出ステップと、
前記第1位置誤差および前記第2位置誤差に基づいて、前記基準姿勢における各前記関節の回転角度に対する、前記第1取得ステップおよび前記第2取得ステップを実行した時点での前記ロボットアームが前記基準姿勢をとった場合の各前記関節の回転角度のズレを取得する誤差情報取得ステップと、を有する。
【0008】
本発明のロボットシステムは、制御点が設定され、アームを回転可能に接続する複数の関節を有し、互いに異なる基準姿勢、第1姿勢および第2姿勢をとり得るロボットアーム、および前記ロボットアームの先端部に設けられ、互いの測定軸が直交する3つの距離計を備えるロボットと、前記ロボットアームの作動を制御するとともに各前記距離計と接続された制御部と、を備え、
前記制御部は、
前記ロボットアームを前記第1姿勢とし、前記3つの距離計を用いて、前記制御点から測定基準となる球体の中心までの第1距離を取得する第1取得ステップと、
前記ロボットアームを前記第2姿勢とし、前記3つの距離計を用いて、前記制御点から前記球体の中心までの第2距離を取得する第2取得ステップと、
前記第1距離に対応する第1基準データと、前記第1取得ステップで取得した前記第1距離と、に基づいて、第1位置誤差を算出するとともに、前記第2距離に対応する第2基準データと、前記第2取得ステップで取得した前記第2距離と、に基づいて、第2位置誤差を算出する算出ステップと、
前記第1位置誤差および前記第2位置誤差に基づいて、前記基準姿勢における各前記関節の回転角度に対する、前記第1取得ステップおよび前記第2取得ステップを実行した時点での前記ロボットアームが前記基準姿勢をとった場合の各前記関節の回転角度のズレを取得する誤差情報取得ステップと、を実行する。
【図面の簡単な説明】
【0009】
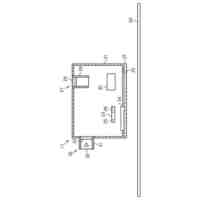
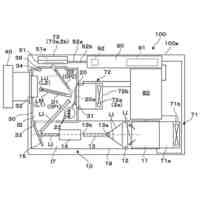
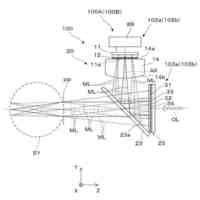
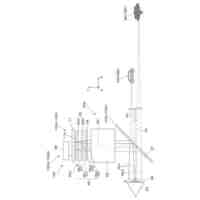
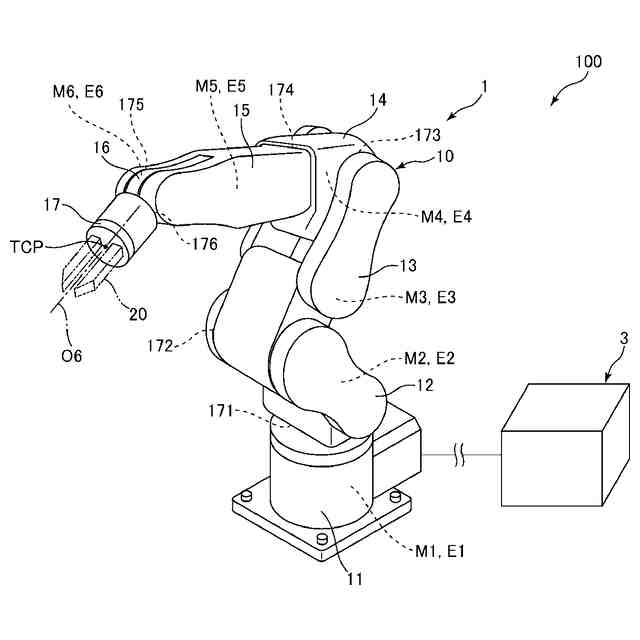
図1は、本発明の実施形態にかかるロボットシステムの第1実施形態を示す全体図である。
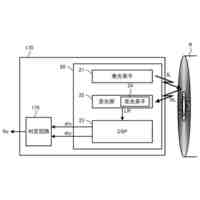
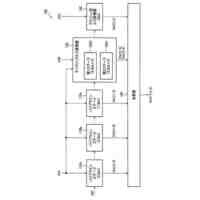
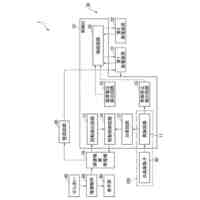
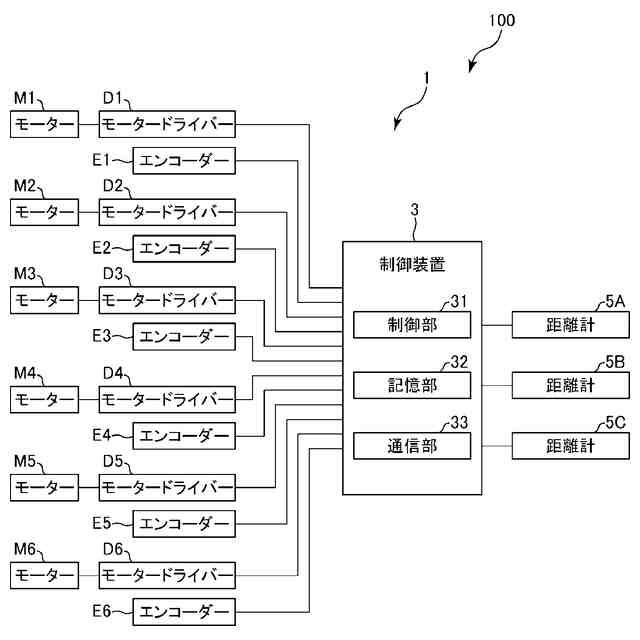
図2は、図1に示すロボットシステムのブロック図である。
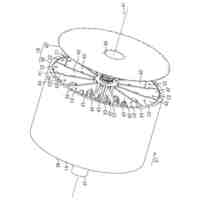
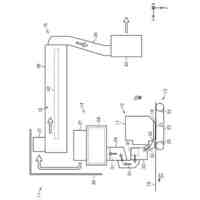
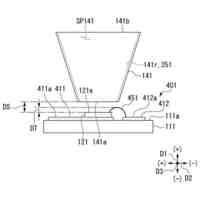
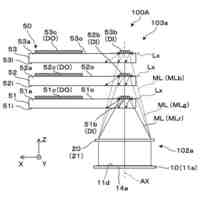
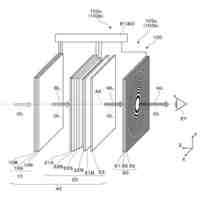
図3は、オフセット調整治具の斜視図である。
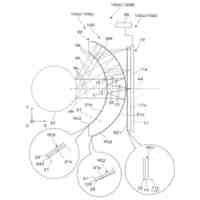
図4は、第1姿勢を説明するための模式図であって、鉛直上方からロボットを見た図である。
図5は、球体の中心と制御点との位置関係を説明するための図である。
図6は、第2姿勢を説明するための模式図であって、鉛直上方からロボットを見た図である。
図7は、球体の中心と制御点との位置関係を説明するための図である。
図8は、球体の中心と制御点との位置関係を説明するための図である。
図9は、球体の中心と制御点との位置関係を説明するための図である。
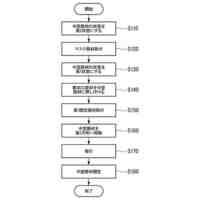
図10は、本発明のロボットシステムの制御方法の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の制御方法およびロボットシステムを添付図面に示す好適な実施形態に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
印刷装置
今日
セイコーエプソン株式会社
印刷装置
今日
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
気体分離膜
2日前
セイコーエプソン株式会社
画像読取装置
2日前
セイコーエプソン株式会社
液体吐出装置
2日前
セイコーエプソン株式会社
虚像表示装置
2日前
セイコーエプソン株式会社
画像読取装置
6日前
セイコーエプソン株式会社
液体吐出ヘッド
2日前
セイコーエプソン株式会社
液体噴射ヘッド
12日前
セイコーエプソン株式会社
プロジェクター
5日前
セイコーエプソン株式会社
プロジェクター
6日前
セイコーエプソン株式会社
A/D変換回路
6日前
セイコーエプソン株式会社
電子制御式機械時計
今日
セイコーエプソン株式会社
スクリーンの製造方法
2日前
セイコーエプソン株式会社
印刷装置及び印刷方法
12日前
セイコーエプソン株式会社
三次元造形物の製造方法
2日前
セイコーエプソン株式会社
制御装置および表示装置
5日前
セイコーエプソン株式会社
三次元造形物の製造方法
5日前
セイコーエプソン株式会社
慣性センサーおよび車両
6日前
セイコーエプソン株式会社
波長可変干渉フィルター
2日前
セイコーエプソン株式会社
保持方法、及び加工方法
2日前
セイコーエプソン株式会社
治具、及び加工システム
2日前
セイコーエプソン株式会社
搬送装置、及び画像形成装置
2日前
セイコーエプソン株式会社
電気光学装置および電子機器
2日前
セイコーエプソン株式会社
インクジェットインク組成物
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
立体物印刷装置および印刷方法
6日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
立体物印刷装置および制御方法
6日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ