TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109525
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024003469
出願日
2024-01-12
発明の名称
通知装置、通知方法及び通知プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250717BHJP(信号)
要約
【課題】先行車両の発進をドライバの状態に応じてドライバに通知することができるようにする。
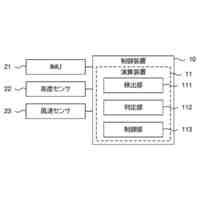
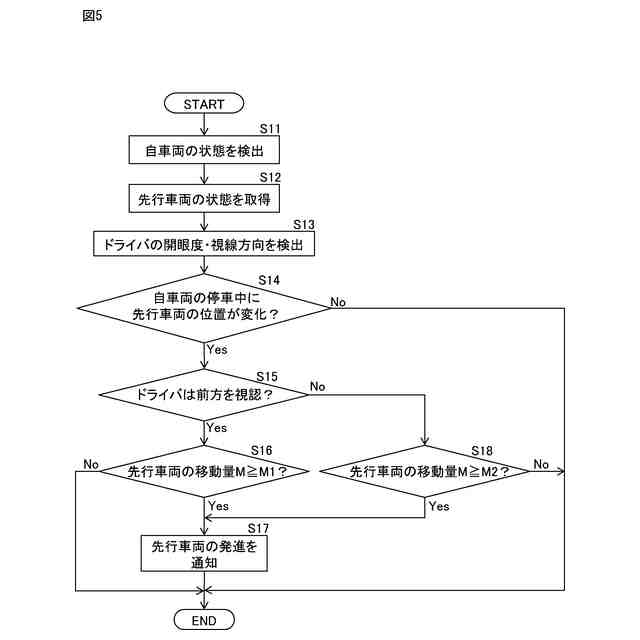
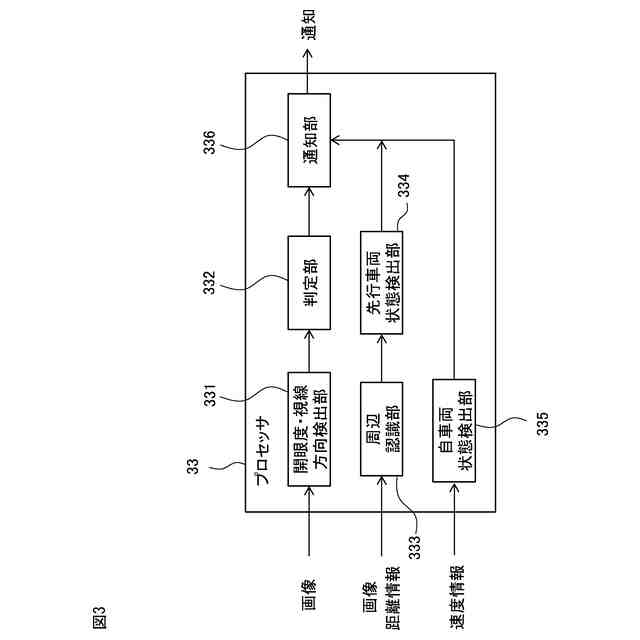
【解決手段】自車両の前方に停車している先行車両の発進を自車両のドライバに通知する通知装置は、ドライバが前方を視認しているか否かを判定する判定部332と、先行車両の状態を検出する状態検出部334と、ドライバへ先行車両の発進を通知する通知部336と、を備える。通知部は、ドライバが前方を視認していると判定された場合と、ドライバが前方を視認していないと判定された場合とで状態検出部によって検出された先行車両の状態に基づくドライバへの先行車両の発進の通知形態を変更する。通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む。
【選択図】図5
特許請求の範囲
【請求項1】
自車両の前方に停車している先行車両の発進を前記自車両のドライバに通知する通知装置であって、
前記ドライバが前方を視認しているか否かを判定する判定部と、
前記先行車両の状態を検出する状態検出部と、
前記ドライバへ先行車両の発進を通知する通知部と、を備え、
前記通知部は、前記ドライバが前方を視認していると判定された場合と、前記ドライバが前方を視認していないと判定された場合とで、前記状態検出部によって検出された前記先行車両の状態に基づく前記ドライバへの前記先行車両の発進の通知形態を変更し、
前記通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む、通知装置。
続きを表示(約 1,500 文字)
【請求項2】
前記通知部は、前記ドライバが前方を視認していないと判定された場合には、前記ドライバが前方を視認していると判定された場合に比べて、前記先行車両が発進してから早いタイミングで、前記ドライバへ先行車両の発進を通知する、請求項1に記載の通知装置。
【請求項3】
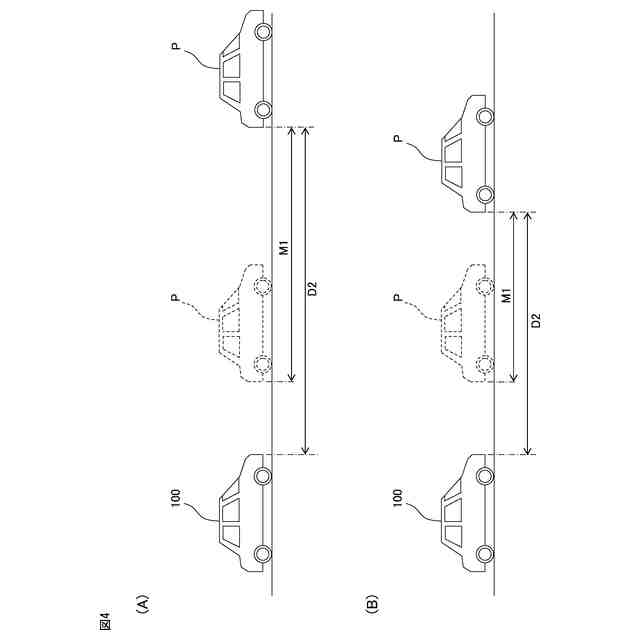
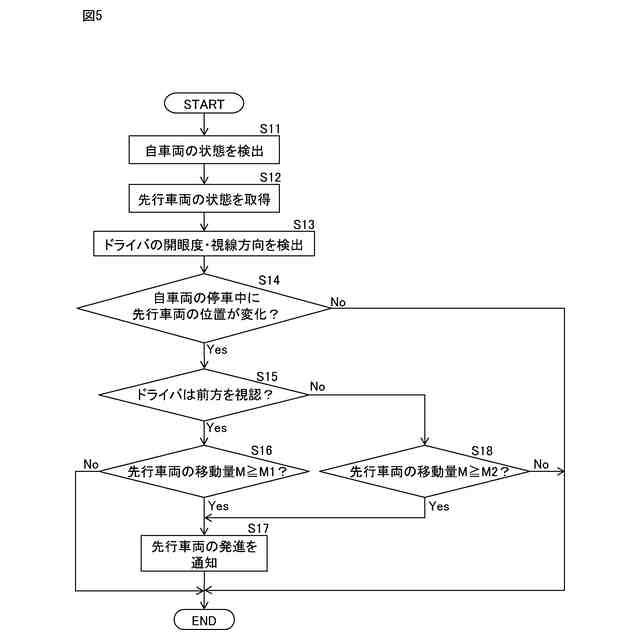
前記通知部は、前記ドライバが前方を視認していると判定された場合には、発進した前記先行車両の移動量が第1移動量以上になると前記ドライバへ先行車両の発進を通知し、且つ、前記ドライバが前方を視認していないと判定された場合には、発進した前記先行車両の移動量が前記第1移動量未満の第2移動量以上になると前記ドライバへ前記先行車両の発進を通知する、請求項2に記載の通知装置。
【請求項4】
前記通知部は、前記ドライバが前方を視認していると判定された場合には、前記先行車両が発進してからの経過時間が第1時間以上になると前記ドライバへ先行車両の発進を通知し、且つ、前記ドライバが前方を視認してないと判定された場合には、前記先行車両が発進してからの経過時間が前記第1時間未満の第2時間以上になると前記ドライバへの前記先行車両の発進を通知する、請求項2に記載の通知装置。
【請求項5】
前記通知部は、前記ドライバが前方を視認していると判定された場合には、前記自車両から前記先行車両までの距離が第1距離以上になると前記ドライバへ先行車両の発進を通知し、且つ、前記ドライバが前方を視認していないと判定された場合には、前記自車両から前記先行車両までの距離が前記第1距離未満の第2距離以上になると前記ドライバへ前記先行車両の発進を通知する、請求項2に記載の通知装置。
【請求項6】
前記通知部は、前記判定部によって前記ドライバが前方を視認していると判定された場合には、前記状態検出部によって前記先行車両が発進したことが検出されても、前記ドライバへ前記先行車両の発進を通知しない、請求項1に記載の通知装置。
【請求項7】
自車両の前方に停車している先行車両の発進を前記自車両のドライバに通知する、自車両のプロセッサによって行われる通知方法であって、
前記ドライバが前方を視認しているか否かを判定することと、
前記先行車両の状態を検出することと、
前記ドライバへ先行車両の発進を通知することと、を含み、
前記ドライバへ先行車両の発進を通知するときには、前記ドライバが前方を視認していると判定された場合と、前記ドライバが前方を視認していないと判定された場合とで、前記先行車両の状態に基づく前記ドライバへの前記先行車両の発進の通知形態が変更され、
前記通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む、通知方法。
【請求項8】
自車両の前方に停車している先行車両の発進を前記自車両のドライバに通知する通知プログラムであって、
前記ドライバが前方を視認しているか否かを判定することと、
前記先行車両の状態を検出することと、
前記ドライバへ先行車両の発進を通知することと、
をコンピュータに実行させ、
前記ドライバへ先行車両の発進を通知するときには、前記ドライバが前方を視認していると判定された場合と、前記ドライバが前方を視認していないと判定された場合とで、前記先行車両の状態に基づく前記ドライバへの前記先行車両の発進の通知形態が変更され、
前記通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む、通知プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、通知装置、通知方法及び通知プログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
渋滞停車時に先行車両に向けて超音波を発信して、反射してきた反射波を捉え、先行車両が発進して自車両との車間距離が所定距離に達したことを検出してドライバに通知するようにした、車間距離警報装置が従来から知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2000-338240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載の装置では、ドライバの状態にかかわらずに一律に車間距離が所定距離に達したときに、ドライバへの通知が行われている。したがって、この所定距離を長く設定すると、ドライバが脇見や居眠りをしていて先行車両の発進を認識していない場合に、ドライバへの通知が遅れる可能性がある。一方で、この所定距離を短く設定すると、ドライバが前方に注意していて先行車両の発進を認識しているにもかかわらず、ドライバの操作が少し遅れるだけで、ドライバへの通知が行われてしまう可能性がある。
【0005】
上記課題に鑑みて、本開示の目的は、先行車両の発進をドライバの状態に応じてドライバに通知することができるようにすることにある。
【課題を解決するための手段】
【0006】
本開示の要旨は以下のとおりである。
【0007】
(1)自車両の前方に停車している先行車両の発進を前記自車両のドライバに通知する通知装置であって、
前記ドライバが前方を視認しているか否かを判定する判定部と、
前記先行車両の状態を検出する状態検出部と、
前記ドライバへ先行車両の発進を通知する通知部と、を備え、
前記通知部は、前記ドライバが前方を視認していると判定された場合と、前記ドライバが前方を視認していないと判定された場合とで、前記状態検出部によって検出された前記先行車両の状態に基づく前記ドライバへの前記先行車両の発進の通知形態を変更し、
前記通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む、通知装置
(2)前記通知部は、前記ドライバが前方を視認していないと判定された場合には、前記ドライバが前方を視認していると判定された場合に比べて、前記先行車両が発進してから早いタイミングで、前記ドライバへ先行車両の発進を通知する、上記(1)に記載の通知装置。
(3)前記通知部は、前記ドライバが前方を視認していると判定された場合には、発進した前記先行車両の移動量が第1移動量以上になると前記ドライバへ先行車両の発進を通知し、且つ、前記ドライバが前方を視認していないと判定された場合には、発進した前記先行車両の移動量が前記第1移動量未満の第2移動量以上になると前記ドライバへ前記先行車両の発進を通知する、上記(2)に記載の通知装置。
(4)前記通知部は、前記ドライバが前方を視認していると判定された場合には、前記先行車両が発進してからの経過時間が第1時間以上になると前記ドライバへ先行車両の発進を通知し、且つ、前記ドライバが前方を視認してないと判定された場合には、前記先行車両が発進してからの経過時間が前記第1時間未満の第2時間以上になると前記ドライバへの前記先行車両の発進を通知する、上記(2)に記載の通知装置。
(5)前記通知部は、前記ドライバが前方を視認していると判定された場合には、前記自車両から前記先行車両までの距離が第1距離以上になると前記ドライバへ先行車両の発進を通知し、且つ、前記ドライバが前方を視認していないと判定された場合には、前記自車両から前記先行車両までの距離が前記第1距離未満の第2距離以上になると前記ドライバへ前記先行車両の発進を通知する、上記(2)に記載の通知装置。
(6)前記通知部は、前記判定部によって前記ドライバが前方を視認していると判定された場合には、前記状態検出部によって前記先行車両が発進したことが検出されても、前記ドライバへ前記先行車両の発進を通知しない、上記(1)に記載の通知装置。
(7)自車両の前方に停車している先行車両の発進を前記自車両のドライバに通知する、自車両のプロセッサによって行われる通知方法であって、
前記ドライバが前方を視認しているか否かを判定することと、
前記先行車両の状態を検出することと、
前記ドライバへ先行車両の発進を通知することと、を含み、
前記ドライバへ先行車両の発進を通知するときには、前記ドライバが前方を視認していると判定された場合と、前記ドライバが前方を視認していないと判定された場合とで、前記先行車両の状態に基づく前記ドライバへの前記先行車両の発進の通知形態が変更され、
前記通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む、通知方法。
(8)自車両の前方に停車している先行車両の発進を前記自車両のドライバに通知する通知プログラムであって、
前記ドライバが前方を視認しているか否かを判定することと、
前記先行車両の状態を検出することと、
前記ドライバへ先行車両の発進を通知することと、
をコンピュータに実行させ、
前記ドライバへ先行車両の発進を通知するときには、前記ドライバが前方を視認していると判定された場合と、前記ドライバが前方を視認していないと判定された場合とで、前記先行車両の状態に基づく前記ドライバへの前記先行車両の発進の通知形態が変更され、
前記通知形態は、通知のタイミング、通知の有無、及び通知方法のうちの少なくともいずれか一つを含む、通知プログラム。
【発明の効果】
【0008】
本開示によれば、先行車両の発進をドライバの状態に応じてドライバに通知することができるようにすることができる。
【図面の簡単な説明】
【0009】
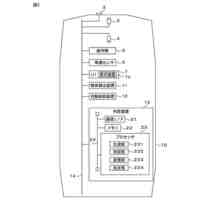
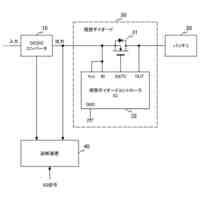
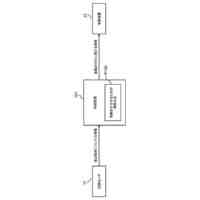
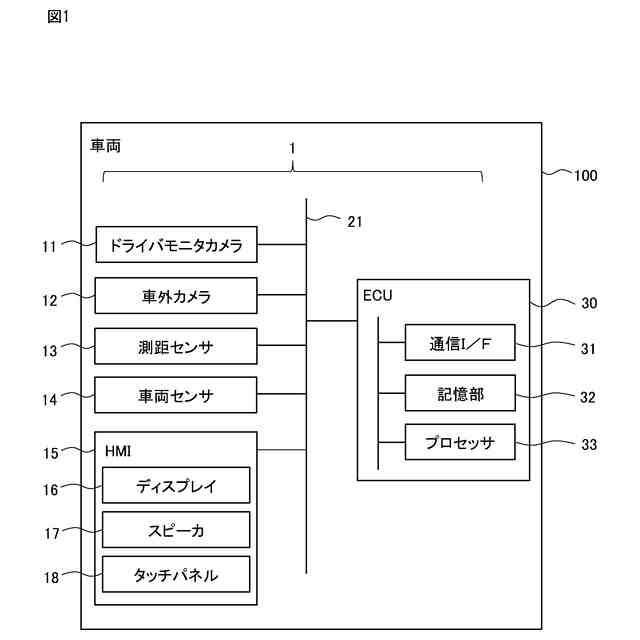
図1は、通知システムの構成を示す概略的なブロック図である。
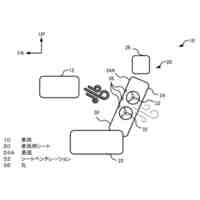
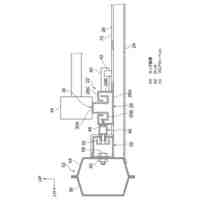
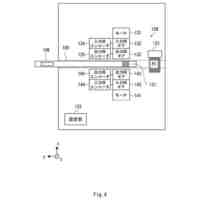
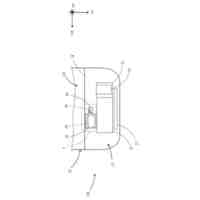
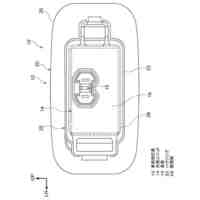
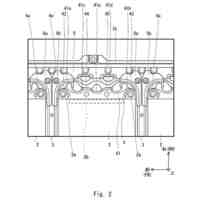
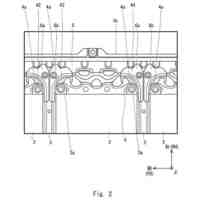
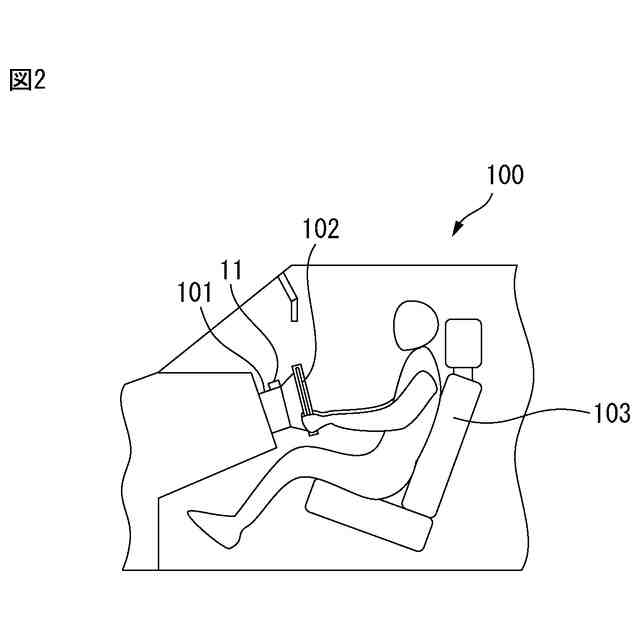
図2は、通知システムを搭載した車両の内部を部分的に示す概略側面図である。
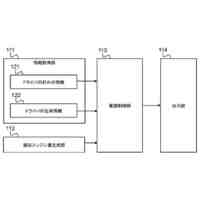
図3は、ECUのプロセッサの機能ブロック図である。
図4は、先行車両の発進を通知するタイミングを説明するための図である。
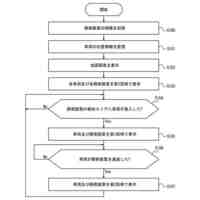
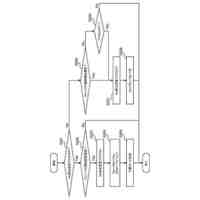
図5は、通知装置によって行われる通知処理の流れを示すフローチャートである。
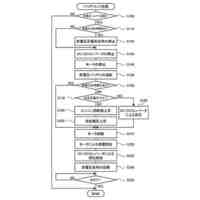
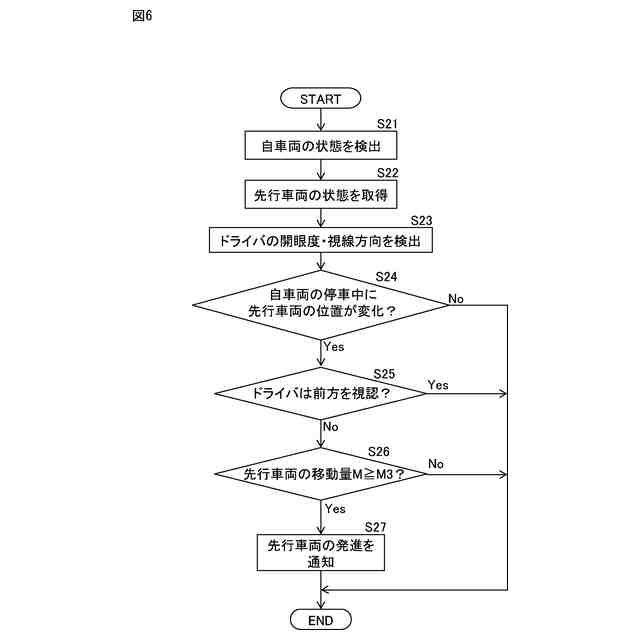
図6は、第2実施形態に係る通知装置によって行われる通知処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態について詳細に説明する。なお、以下の説明では、同様な構成要素には同一の参照番号を付す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
方法
7日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
膜体
9日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
自動車
1日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
ステータ
1日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
評価方法
9日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
コネクタ
9日前
トヨタ自動車株式会社
判定装置
1日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
充電設備
9日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
車両構造
6日前
トヨタ自動車株式会社
駆動装置
3日前
トヨタ自動車株式会社
電動車両
15日前
トヨタ自動車株式会社
燃料電池
21日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
監視装置
今日
トヨタ自動車株式会社
記録装置
今日
トヨタ自動車株式会社
診断装置
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
車両用灯具
6日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
電気自動車
8日前
トヨタ自動車株式会社
電気自動車
8日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
電池パック
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ