TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139682
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024038644
出願日
2024-03-13
発明の名称
製函装置
出願人
花王株式会社
代理人
弁理士法人翔和国際特許事務所
主分類
B65B
43/28 20060101AFI20250919BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】製函動作の制御に関し、教示の容易性と制御精度とを両立できる製函装置を提供すること。
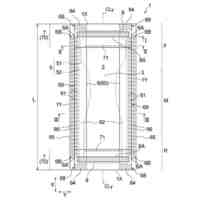
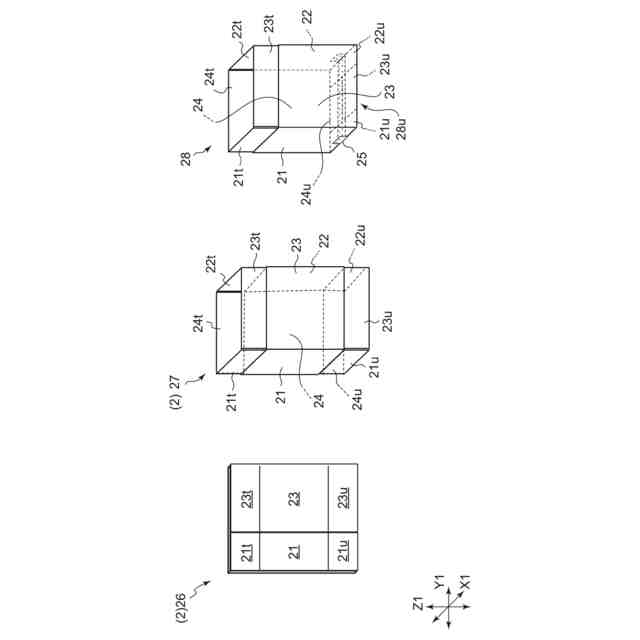
【解決手段】本発明の製函装置100の位置決め機構10は、下端ガイド部と側縁ガイド部とを具備している。位置決め機構10は、平板形状のダンボール材26が、一枚ずつ供給されて、下端縁部が下端ガイド部に沿って、Y軸方向の一方側の端縁が側縁ガイド部に沿って配置されるようになされている。製函装置100が備えるロボットは、エンドエフェクタによって、平板形状のダンボール材26を展開する展開動作と、筒状の立体形状に展開されたダンボール材27を、底折り機構による底折り及び/又は折り固定機構5による折り固定を行う準備位置に移動させる移動動作とを行い、展開動作及び移動動作を、X軸、Y軸、及びZ軸の1以上の原点位置を異ならせた座標系C1~C3で制御する。
【選択図】図12
特許請求の範囲
【請求項1】
ダンボール材を用いて、一対の正面部、一対の側面部及び底面部を有するダンボール箱を製函する製函装置であって、
前記ダンボール材は、平板形状に折り畳まれた状態と筒状の立体形状に展開された状態とで、向きが同じままの前記正面部、及び向きが変わる前記側面部を含み、
エンドエフェクタとして吸着手段が接続されたアームを有するロボットと、
平板形状に折り畳まれた前記ダンボール材を前記吸着手段の移動によって展開できるように位置決めする位置決め機構と、
前記底面部を形成するための底折り機構及び折り固定機構とを具備しており、
展開された前記ダンボール材の前記一対の正面部が対向する前後方向をX軸方向、前記一対の側面部が対向する左右方向をY軸方向、該X軸方向及び該Y軸方向に直交する上下方向をZ方向としたとき、
前記位置決め機構は、下端ガイド部と側縁ガイド部とを具備し、平板形状の前記ダンボール材が、一枚ずつ供給されて、下端縁部が前記下端ガイド部に沿って、Y軸方向の一方側の端縁が前記側縁ガイド部に沿って配置されるようになされており、
前記ロボットは、
前記エンドエフェクタによって、平板形状の前記ダンボール材を展開する展開動作と、筒状の立体形状に展開された前記ダンボール材を、前記底折り機構による底折り及び/又は前記折り固定機構による折り固定を行う準備位置に移動させる移動動作とを行い、
前記展開動作及び前記移動動作を、X軸、Y軸、及びZ軸の1以上の原点位置を異ならせた座標系で制御する、製函装置。
続きを表示(約 590 文字)
【請求項2】
前記ロボットは、平板形状の前記ダンボール材の寸法に応じたオフセット量に基づいて、前記展開動作と前記移動動作を制御する、請求項1に記載の製函装置。
【請求項3】
前記オフセット量は、前記製函装置が製函可能な平板形状の前記ダンボール材の最大寸法を基準とする、請求項2に記載の製函装置。
【請求項4】
前記移動動作は、筒状の立体形状に展開された前記ダンボール材を前記底折り機構の準備位置に移動させる第1移動動作と、前記折り固定機構が具備する一対の搬送支持部間に底折りした前記ダンボール材を押し込む第2移動動作とを具備し、
前記ロボットは、双腕型ロボットであるか、又は複数の単腕型ロボットにより構成されており、
一の前記エンドエフェクタによって前記展開動作及び第1移動動作を行い、別の前記エンドエフェクタによって第2移動動作を行う、請求項1~3の何れか1項に記載の製函装置。
【請求項5】
前記底折り機構及び前記折り固定機構が、前記位置決め機構の前記下端ガイド部よりも下方に配置されている、請求項1~3の何れか1項に記載の製函装置。
【請求項6】
前記展開動作及び前記移動動作を、前記X軸、Y軸、及びZ軸の1以上の正負を反転させた座標系で制御する、請求項1~3の何れか1項に記載の製函装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ダンボール材を用いて、一対の正面部、一対の側面部及び底面部を有するダンボール箱を製函する製函装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
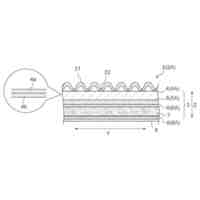
ダンボール箱は、平板形状に折り畳まれたダンボール材を六面体形状に立体化して、製造されることが一般的である。ダンボール材からダンボール箱を製造する製函装置に、ロボットアームを備えたロボットを用いることが知られている。
例えば特許文献1には、ダンボール材を吸着するピッキング部と、該ピッキング部によって立体形状に広げられたダンボール材の下部を折り畳んで底部を形成する折り畳み部とを含む、ランダム製函装置が開示されている。
【0003】
また本出願人は先に、エンドエフェクタが接続された複数のアームを有するロボットと、箱保持装置とを備え、該ロボットの第1のアームに取り付けられた吸着手段が、箱を着脱自在に保持し得る、製函装置を提案している(特許文献2)。
【0004】
特許文献3には、物品を保持するハンドと、折り曲げ処理のときに、物品の第一被折り曲げ部が当接される第一当接部とを備え、該ハンドが、アームと接続される基部と、該基部に対して回動可能であり且つ前記物品を保持する保持部とを有する、ロボットシステムが開示されている。
【先行技術文献】
【特許文献】
【0005】
特表2015-505785号公報
特開2017-119411号公報
特開2021-010971号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
これら特許文献に記載のロボットように、ロボットアームを備える多関節ロボットは、動作(運動)の自由度が高いことにより、複雑な作業が可能である一方、該動作制御が緻密になることで、ロボットティーチング(教示)を容易に行い難くなり、製函動作の制御精度も低下する傾向にある。特許文献1~3の技術は、製函動作の制御に関し、教示の容易性と制御精度とを両立させる点に改善の余地があった。
【0007】
本発明は、製函動作の制御に関し、教示の容易性と制御精度とを両立できる製函装置を提供することに関する。
【課題を解決するための手段】
【0008】
本発明は、ダンボール材を用いて、一対の正面部、一対の側面部及び底面部を有するダンボール箱を製函する製函装置に関する。
一実施形態として、前記ダンボール材は、平板形状に折り畳まれた状態と筒状の立体形状に展開された状態とで、向きが同じままの前記正面部、及び向きが変わる前記側面部を含むことが好ましい。
一実施形態として、前記製函装置は、エンドエフェクタとして吸着手段が接続されたアームを有するロボットと、
平板形状に折り畳まれた前記ダンボール材を前記吸着手段の移動によって展開できるように位置決めする位置決め機構と、
前記底面部を形成するための底折り機構及び折り固定機構とを具備していることが好ましい。
一実施形態として、展開された前記ダンボール材の前記一対の正面部が対向する前後方向をX軸方向、前記一対の側面部が対向する左右方向をY軸方向、該X軸方向及び該Y軸方向に直交する上下方向をZ方向としたとき、
前記位置決め機構は、下端ガイド部と側縁ガイド部とを具備し、平板形状の前記ダンボール材が、一枚ずつ供給されて、下端縁部が前記下端ガイド部に沿って、Y軸方向の一方側の端縁が前記側縁ガイド部に沿って配置されるようになされていることが好ましい。
一実施形態として、前記ロボットは、
前記エンドエフェクタによって、平板形状の前記ダンボール材を展開する展開動作と、筒状の立体形状に展開された前記ダンボール材を、前記底折り機構による底折り及び/又は前記折り固定機構による折り固定を行う準備位置に移動させる移動動作とを行うことが好ましい。
一実施形態として、前記製函装置は、前記展開動作及び前記移動動作を、X軸、Y軸、及びZ軸の1以上の原点位置を異ならせた座標系で制御することが好ましい。
【発明の効果】
【0009】
本発明の製函装置によれば、製函動作の制御に関し、教示の容易性と制御精度とを両立できる。
【図面の簡単な説明】
【0010】
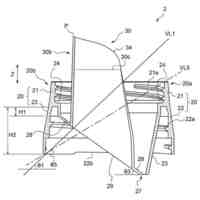
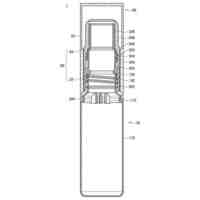
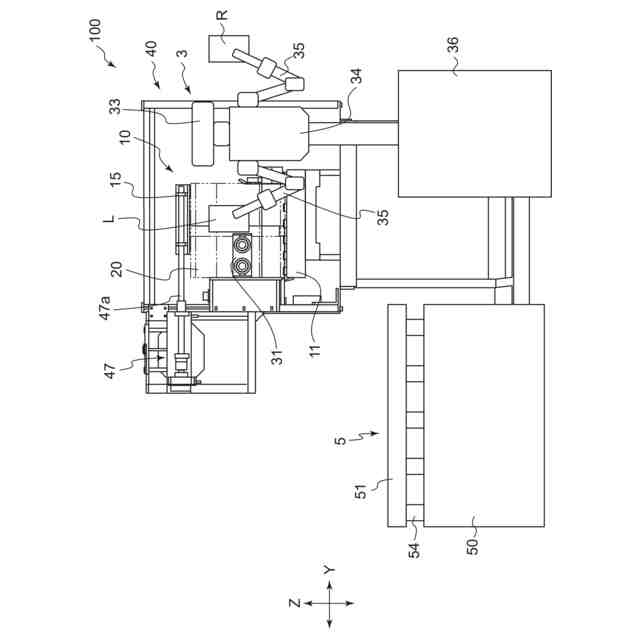
図1は、本発明の製函装置の好ましい一実施形態を示す正面図である。
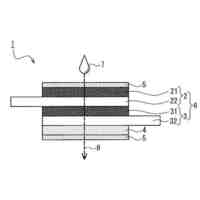
図2(a)~(c)は、図1に示すダンボール材を箱状に組み立てる組立てを説明するための斜視図である。
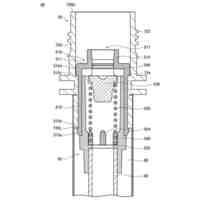
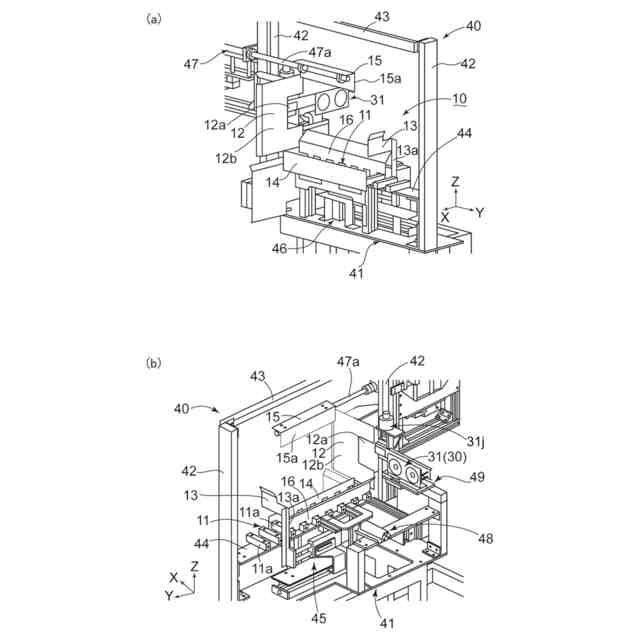
図3(a)は、図1に示す位置決め機構を正面側から視た斜視図であり、図3(b)は、該位置決め機構を背面側から視た斜視図である。
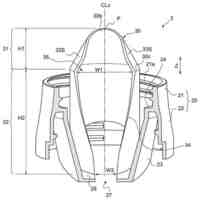
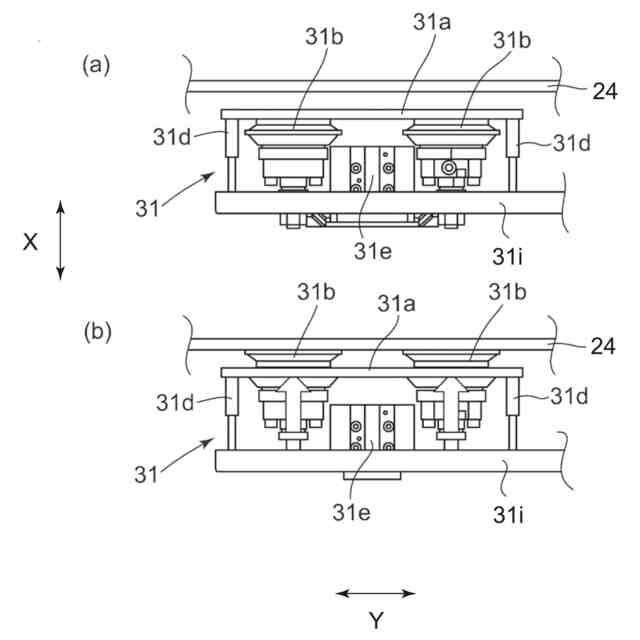
図4(a)及び(b)は、図3に示す第1面保持部の平面図である。
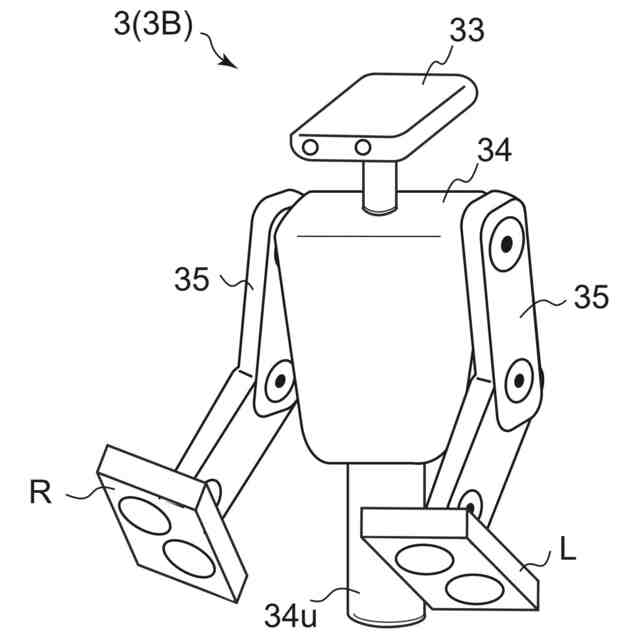
図5は、図1に示すロボットの斜視図である。
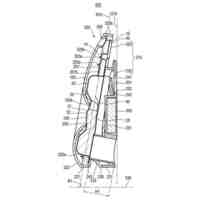
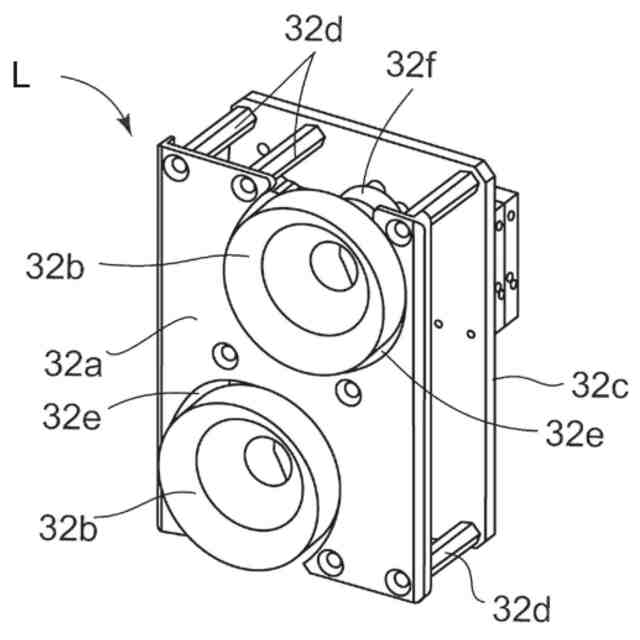
図6は、図5に示す左ハンドを吸着手段側から視た斜視図である。
図7は、図1に示す底折り機構の平面図である。
図8(a)及び(b)は、位置決め機構によるダンボール材の位置決め工程を説明するための概略正面図及び概略側面図である。
図9(a)及び(b)は、位置決め工程後における第1面保持部の動作を説明するための概略正面図及び概略側面図である。
図10は、図3に示す正面側下部ガイドプレート及び正面側上部ガイドプレートを退避させる退避工程(a)と、該退避工程後における左ハンド及び第1面保持部の動作(b)を説明するための概略側面図である。
図11(a)及び(b)は、ダンボール材を矩形筒状に展開させる展開工程を説明するための概略斜視図である。
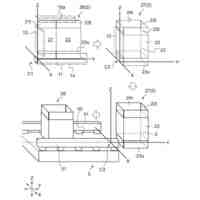
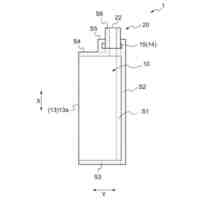
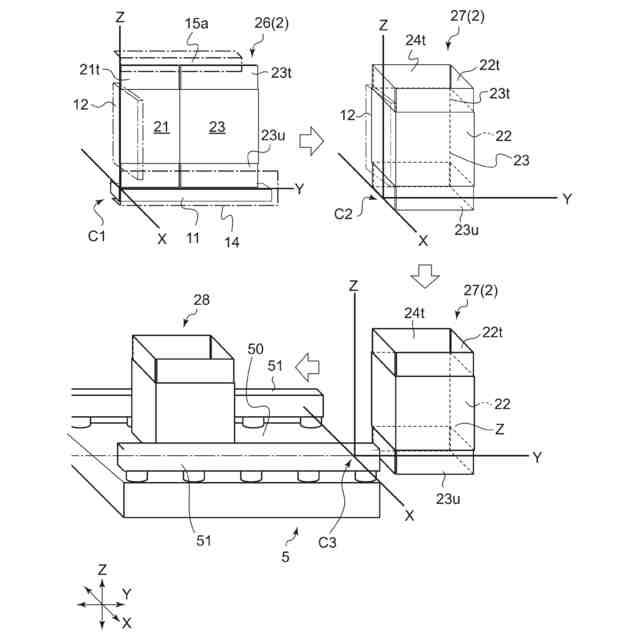
図12は、図1に示すロボットが行う展開工程及び移動工程の各座標系を説明するための斜視図である。
図13(a)及び(b)は、図11に示す展開工程における左ハンドの保持位置を示す概略正面図である。
図14(a)及び(b)は、展開工程における左ハンドの保持位置の移動軌道を示す概略平面図である。
図15(a)及び(b)は、第1移動工程における左ハンドの保持位置を示す概略平面図である。
図16(a)及び(b)は、図12に示す第1移動工程における右ハンドの保持位置を示す概略正面図である。
図17(a)及び(b)は、図12に示す第2移動工程における左ハンドの保持位置を示す概略正面図である。
図18(a)及び(b)は、図12に示す第2移動工程における右ハンドの保持位置を示す概略正面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
花王株式会社
容器
2か月前
花王株式会社
飲料
2か月前
花王株式会社
組立体
11日前
花王株式会社
放散装置
20日前
花王株式会社
注出部材
2か月前
花王株式会社
注出部材
2か月前
花王株式会社
製函装置
1日前
花王株式会社
消臭方法
2か月前
花王株式会社
固形食品
13日前
花王株式会社
化粧料容器
2か月前
花王株式会社
皮膚化粧料
2か月前
花王株式会社
吸収性物品
13日前
花王株式会社
吸収性物品
1か月前
花王株式会社
アイマスク
2か月前
花王株式会社
吸収性物品
1か月前
花王株式会社
カプセル剤
2か月前
花王株式会社
吸収性物品
1か月前
花王株式会社
吸収性物品
2か月前
花王株式会社
油性化粧料
1日前
花王株式会社
皮膚外用剤
2か月前
花王株式会社
樹脂組成物
2か月前
花王株式会社
容器組立体
1か月前
花王株式会社
固形入浴剤
1か月前
花王株式会社
パウチ容器
1か月前
花王株式会社
エッチング液
2か月前
花王株式会社
吸収性パッド
2か月前
花王株式会社
鋳型用組成物
1か月前
花王株式会社
洗浄剤組成物
2か月前
花王株式会社
消臭剤組成物
2か月前
花王株式会社
消臭剤組成物
2か月前
花王株式会社
シート材容器
1か月前
花王株式会社
抗菌剤組成物
2か月前
花王株式会社
消臭剤組成物
2か月前
花王株式会社
水解性シート
2か月前
花王株式会社
吸収性パッド
27日前
花王株式会社
酵素センサー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ