TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110063
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003779
出願日
2024-01-15
発明の名称
印刷方法および印刷システム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B05C
5/00 20060101AFI20250718BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
【課題】高品質な印刷を効率的に行うことができる印刷方法および印刷システムを提供すること。
【解決手段】印刷方法は、インクを吐出する複数のノズルを有する印刷ヘッドを備えるロボットアームを用い、印刷軌道に沿って対象物と前記印刷ヘッドとを相対的に移動させつつ各前記ノズルから所定のタイミングで前記インクを吐出することにより前記対象物に印刷パターンを印刷する印刷方法であって、前記印刷ヘッドは、インク吐出電圧が印加されることにより前記ノズルから前記インクを吐出するよう構成され、前記複数のノズルが並ぶノズル面の水平面に対する傾きに応じて、前記インク吐出電圧を変化させる。
【選択図】図10
特許請求の範囲
【請求項1】
インクを吐出する複数のノズルを有する印刷ヘッドを備えるロボットアームを用い、印刷軌道に沿って対象物と前記印刷ヘッドとを相対的に移動させつつ各前記ノズルから所定のタイミングで前記インクを吐出することにより前記対象物に印刷パターンを印刷する印刷方法であって、
前記印刷ヘッドは、インク吐出電圧が印加されることにより前記ノズルから前記インクを吐出するよう構成され、
前記複数のノズルが並ぶノズル面の水平面に対する傾きに応じて、前記インク吐出電圧を変化させることを特徴とする印刷方法。
続きを表示(約 630 文字)
【請求項2】
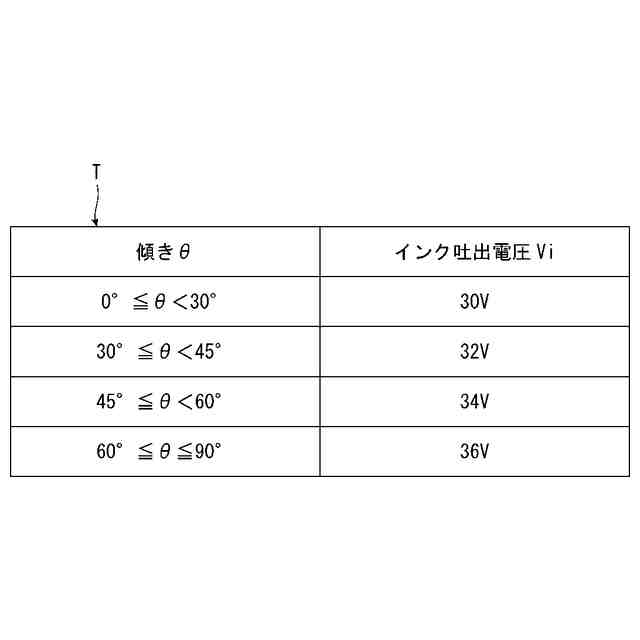
前記傾きが大きくなる程、前記インク吐出電圧を大きくする請求項1に記載の印刷方法。
【請求項3】
前記印刷パターンは、模様である請求項1に記載の印刷方法。
【請求項4】
前記インク吐出電圧と前記傾きとの関係を定めるテーブルに基づいて、前記インク吐出電圧を決定する請求項1に記載の印刷方法。
【請求項5】
前記傾きは、前記ロボットアームの姿勢に基づいて検出する請求項1に記載の印刷方法。
【請求項6】
前記ノズルからの前記インクの吐出速度に基づいて前記インク吐出電圧を変更する請求項1に記載の印刷方法。
【請求項7】
前記印刷軌道が鉛直方向に対して傾斜している請求項1に記載の印刷方法。
【請求項8】
前記印刷軌道が鉛直方向に沿っている請求項1に記載の印刷方法。
【請求項9】
前記印刷の作業中に前記インク吐出電圧を変更する請求項1に記載の印刷方法。
【請求項10】
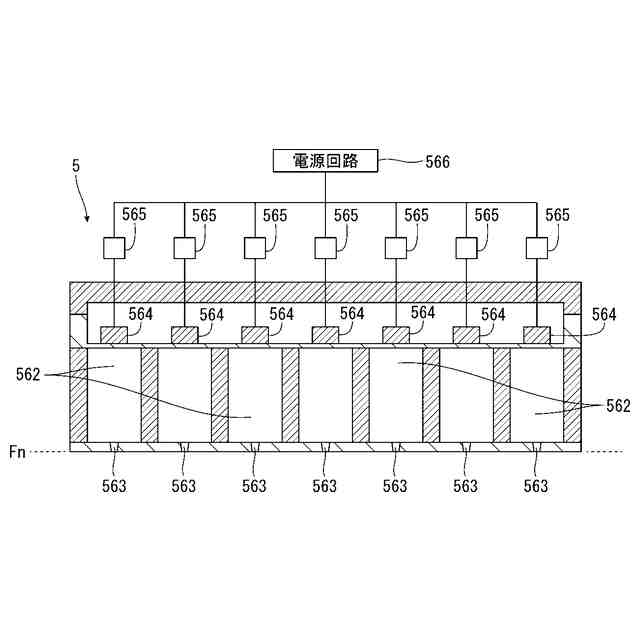
前記印刷ヘッドは、各前記ノズルが形成されている複数のインク室と、各前記インク室と繋がっているリザーバーと、各前記インク室の壁面を振動させる複数の圧電振動素子と、を有し、
各前記圧電振動素子に前記インク吐出電圧を印加することにより、各前記ノズルから前記インクを吐出する請求項1に記載の印刷方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、印刷方法および印刷システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1に記載された車体塗装用ロボットは、ロボットアームと、ロボットアームを、塗装室の床面に沿って一方向に往復動させる移動装置と、ロボットアームの先端に取り付けられた塗装ヘッドと、を有する。また、ロボットアームは、基端側の第1回動アームと、先端側の第2回動アームと、を有する。そして、車体塗装用ロボットでは、塗装ヘッドへのインクの供給を安定させるために第2回動アームを水平に保ちながら、塗装ヘッドからインクを吐出することにより、車体への塗装を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2023-145056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、塗装ヘッドが水平に対して傾斜すると、塗装ヘッドに形成された複数のノズル間に高低差が生じ、鉛直方向上側に位置するノズル程、インクの吐出速度が低下し易くなる。インクの吐出速度が低下すると、インクが車体に着弾する前に終端速度に達し、車体への着弾位置が理想着弾位置に対して大きくずれてしまったり、飛翔途中でミスト化することにより車体への着弾自体が困難になってしまったりする。その結果、印刷品質が低下する。
【課題を解決するための手段】
【0005】
本発明の印刷方法は、インクを吐出する複数のノズルを有する印刷ヘッドを備えるロボットアームを用い、印刷軌道に沿って対象物と前記印刷ヘッドとを相対的に移動させつつ各前記ノズルから所定のタイミングで前記インクを吐出することにより前記対象物に印刷パターンを印刷する印刷方法であって、
前記印刷ヘッドは、インク吐出電圧が印加されることにより前記ノズルから前記インクを吐出するよう構成され、
前記複数のノズルが並ぶノズル面の水平面に対する傾きに応じて、前記インク吐出電圧を変化させる。
【0006】
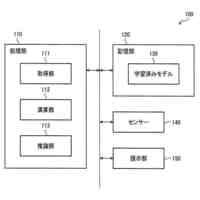
本発明の印刷システムは、インクを吐出する複数のノズルを有する印刷ヘッドを備えるロボットアームと、
前記ロボットアームの駆動を制御する制御装置と、を有し、
印刷軌道に沿って対象物と前記印刷ヘッドとを相対的に移動させつつ各前記ノズルから所定のタイミングで前記インクを吐出することにより前記対象物に印刷パターンを印刷する印刷システムであって、
前記印刷ヘッドは、インク吐出電圧が印加されることにより前記ノズルから前記インクを吐出するよう構成され、
前記制御装置は、前記複数のノズルが並ぶノズル面の水平面に対する傾きに応じて、前記インク吐出電圧を変化させる。
【図面の簡単な説明】
【0007】
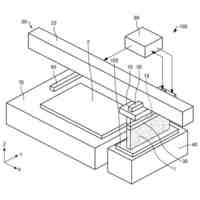
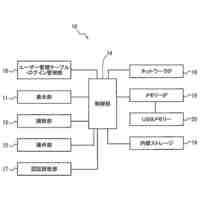
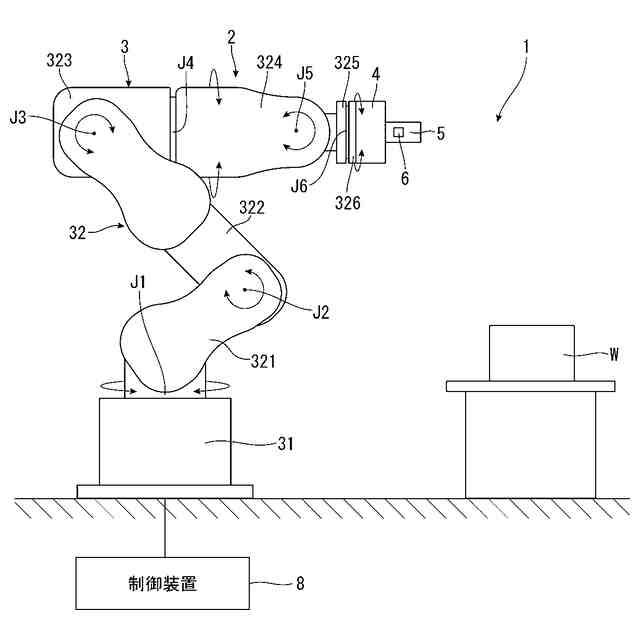
第1実施形態に係る印刷システムの全体図である。
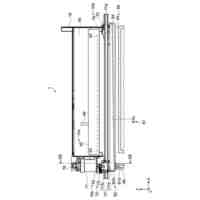
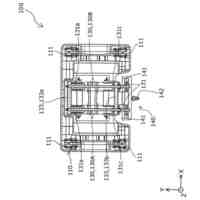
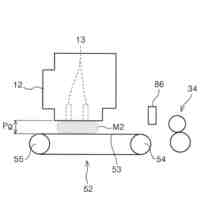
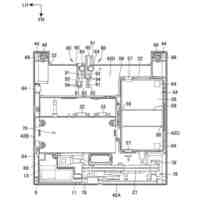
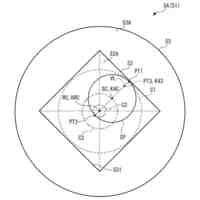
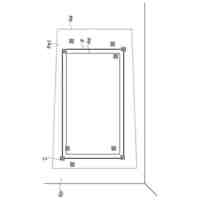
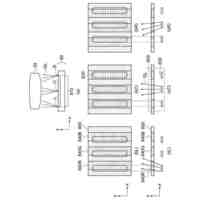
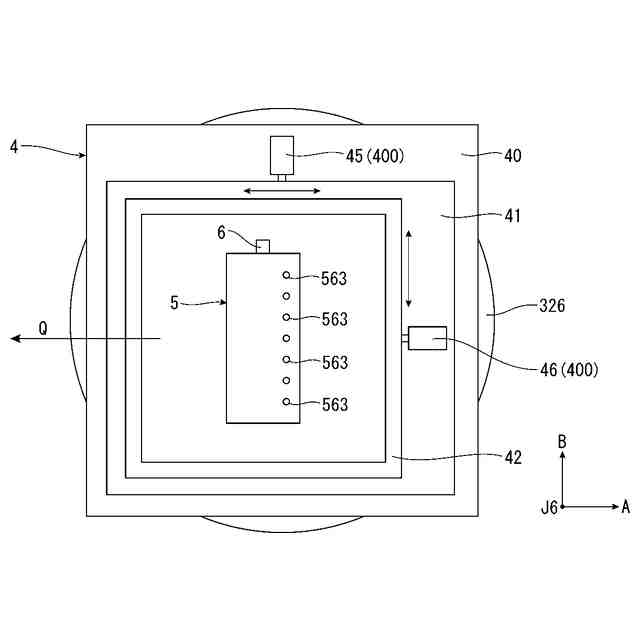
図1に示すロボットが備える移動ステージおよび印刷ヘッドを示す平面図である。
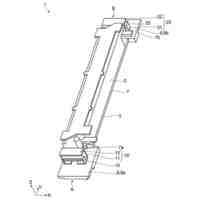
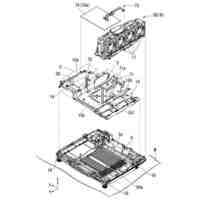
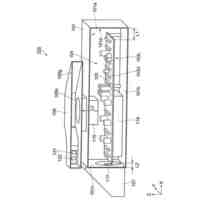
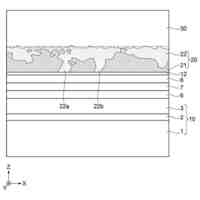
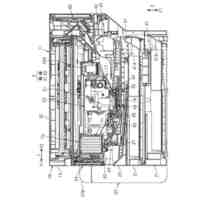
印刷ヘッドを示す分解斜視図である。
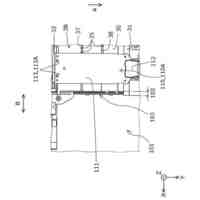
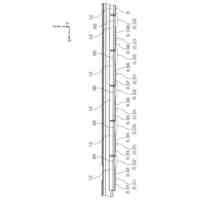
印刷ヘッドを示す斜視断面図である。
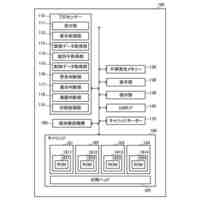
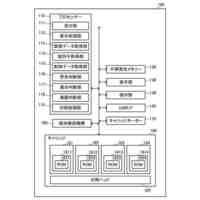
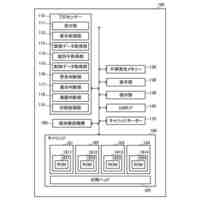
印刷ヘッドの回路構成を示す図である。
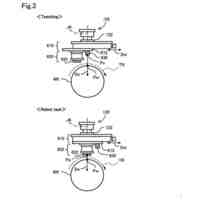
水平状態の印刷ヘッドを示す図である。
傾斜状態の印刷ヘッドを示す図である。
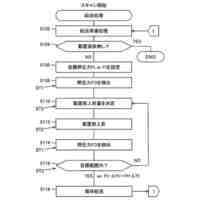
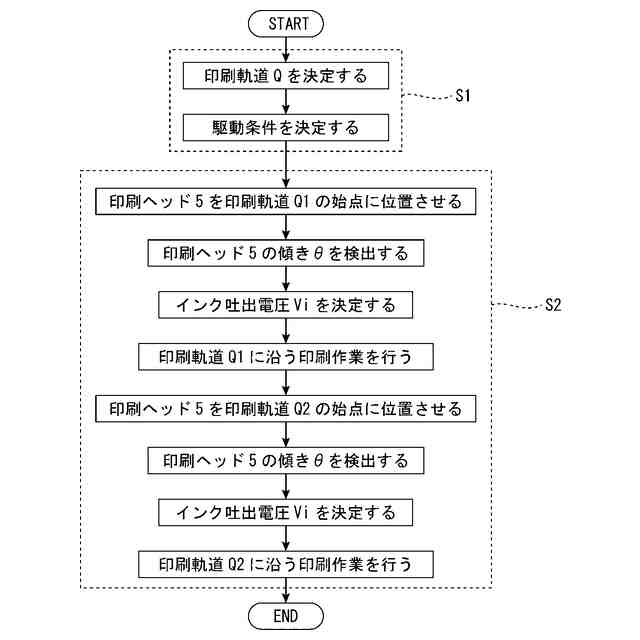
印刷方法を示すフローチャートである。
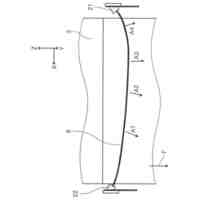
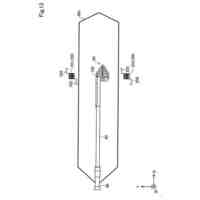
印刷軌道の一例を示す図である。
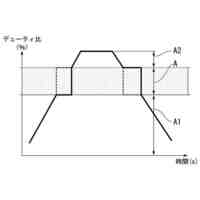
印刷ヘッドの傾きとインク吐出電圧との関係を決定するテーブルを示す図である。
第2実施形態に係る印刷システムが有する印刷ヘッドの回路構成を示す図である。
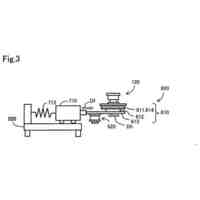
第3実施形態に係る印刷システムが有するロボットの先端部の構成を示す図である。
インクIの吐出速度を検出する方法を説明するための図である。
第4実施形態に係る印刷システムが印刷ヘッドを示す図である。
印刷ヘッドの傾きとインク吐出電圧との関係を決定するテーブルを示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の印刷方法および印刷システムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、第1実施形態に係る印刷システムの全体図である。図2は、図1に示すロボットが備える移動ステージおよび印刷ヘッドを示す平面図である。図3は、印刷ヘッドを示す分解斜視図である。図4は、印刷ヘッドを示す斜視断面図である。図5は、印刷ヘッドの回路構成を示す図である。図6は、水平状態の印刷ヘッドを示す図である。図7は、傾斜状態の印刷ヘッドを示す図である。図8は、印刷方法を示すフローチャートである。図9は、印刷軌道の一例を示す図である。図10は、印刷ヘッドの傾きとインク吐出電圧との関係を決定するテーブルを示す図である。
【0010】
図1に示す印刷システム1は、対象物Wへの印刷を行うロボット2と、ロボット2の駆動を制御する制御装置8と、を有する。また、ロボット2は、ロボットアーム32を備えたロボット本体3と、ロボットアーム32の先端に配置された移動ステージ4と、移動ステージ4に配置された印刷ヘッド5と、印刷ヘッド5に配置された振動計としての慣性センサー6と、を有する。このような印刷システム1では、ロボットアーム32を用いて印刷ヘッド5を印刷軌道Qに沿って移動させつつ、印刷ヘッド5からインクIを所定のタイミングで吐出することにより対象物Wへの印刷作業を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セイコーエプソン株式会社
記録装置
1日前
セイコーエプソン株式会社
回路装置
今日
セイコーエプソン株式会社
印刷装置
1日前
セイコーエプソン株式会社
液体吐出装置
1日前
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
レーザー照射装置
1日前
セイコーエプソン株式会社
ロール体運搬用台車
2日前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
1日前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
1日前
セイコーエプソン株式会社
液体吐出装置、液体吐出方法
1日前
セイコーエプソン株式会社
印刷方法および印刷システム
2日前
セイコーエプソン株式会社
電子機器、及びPOSシステム
1日前
セイコーエプソン株式会社
中継装置、及びPOSシステム
1日前
セイコーエプソン株式会社
回路基板の冷却構造、印刷装置
今日
セイコーエプソン株式会社
画像読取装置および画像読取方法
2日前
セイコーエプソン株式会社
印刷装置、及び、その色補正方法
1日前
セイコーエプソン株式会社
媒体給送装置、及び、その制御方法
2日前
セイコーエプソン株式会社
液体収容体、および、液体噴射装置
1日前
セイコーエプソン株式会社
反射型スクリーンおよび投射システム
5日前
セイコーエプソン株式会社
慣性センサー、慣性センサーの製造方法
1日前
セイコーエプソン株式会社
波長変換装置、光源装置及びプロジェクター
今日
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
2日前
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
2日前
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
2日前
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
2日前
セイコーエプソン株式会社
画像処理方法、プログラム、及びプロジェクター
今日
セイコーエプソン株式会社
ロボットを制御する方法、及び、ロボットシステム
2日前
セイコーエプソン株式会社
ロボットを制御する方法、及び、ロボットシステム
2日前
セイコーエプソン株式会社
液体噴射装置
5日前
セイコーエプソン株式会社
プロジェクター
5日前
セイコーエプソン株式会社
時系列データ処理方法、学習方法、処理システム及び学習システム
2日前
セイコーエプソン株式会社
表示装置及び電子機器
今日
ベック株式会社
被膜形成方法
3か月前
ベック株式会社
被膜形成方法
1か月前
ベック株式会社
被膜形成方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ