TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110065
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003781
出願日
2024-01-15
発明の名称
ロボットを制御する方法、及び、ロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】距離測定を正確に行いながらティーチングを精度良く行える技術を提供する。
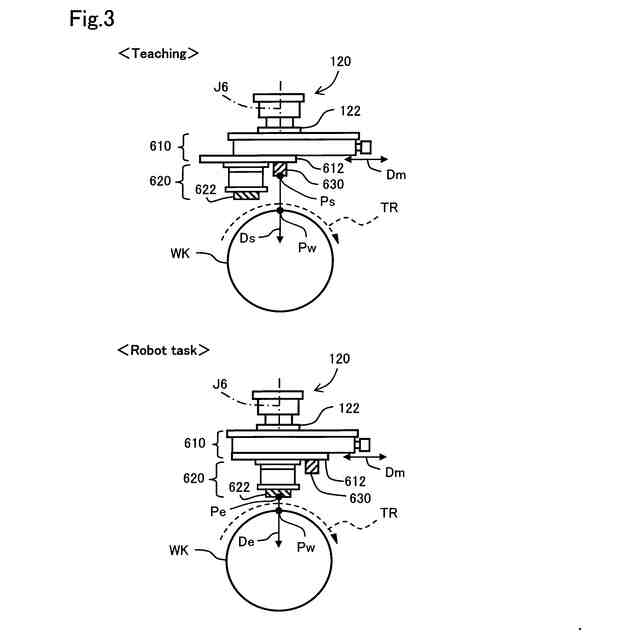
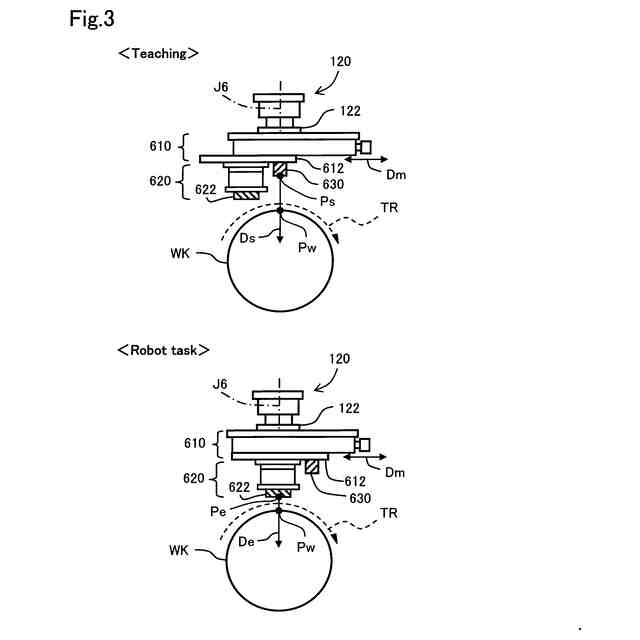
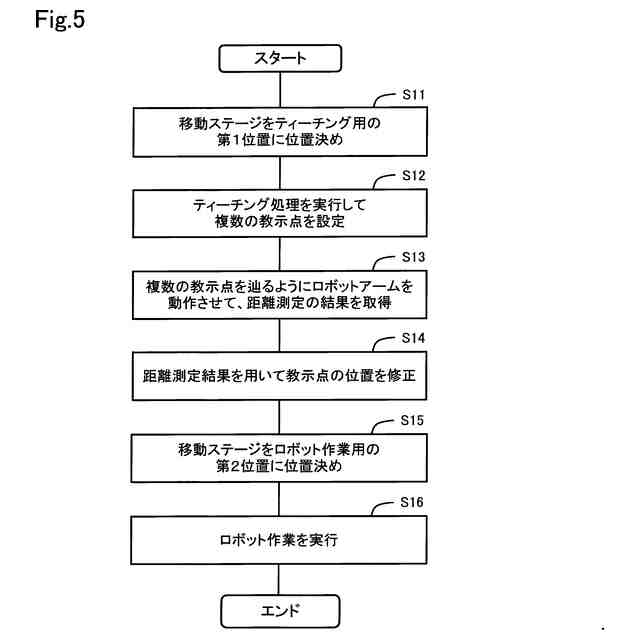
【解決手段】本開示の方法は、(a)ロボットアームの先端部に設置された可動ステージを第1位置に設定することによって、可動ステージに設置された測距装置を、ワークまでの距離を測定するための測距位置に位置決めする工程と、(b)可動ステージが前記第1位置に設定された状態で、測距装置による距離測定を行うとともに距離測定の結果を用いてティーチングを実行する工程と、(c)可動ステージを第1位置と異なる第2位置に設定することによって、可動ステージに設置されたエンドエフェクターを、ワークに対するロボット作業を行うための作業位置に位置決めする工程と、(d)可動ステージが第2位置に設定された状態で、ワークに対するロボット作業を実行する工程と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットを制御する方法であって、
(a)ロボットアームの先端部に設置された可動ステージを第1位置に設定することによって、前記可動ステージに設置された測距装置を、ワークまでの距離を測定するための測距位置に位置決めする工程と、
(b)前記可動ステージが前記第1位置に設定された状態で、前記測距装置による距離測定を行うとともに前記距離測定の結果を用いてティーチングを実行する工程と、
(c)前記可動ステージを前記第1位置と異なる第2位置に設定することによって、前記可動ステージに設置されたエンドエフェクターを、前記ワークに対するロボット作業を行うための作業位置に位置決めする工程と、
(d)前記可動ステージが前記第2位置に設定された状態で、前記ワークに対する前記ロボット作業を実行する工程と、
を含む、方法。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の方法であって、
前記ロボット作業を実施する際に前記エンドエフェクターが前記ワークに向かう方向を前記エンドエフェクターの基準方向としたとき、前記可動ステージは、前記エンドエフェクターの前記基準方向と垂直な方向に移動するように構成されている、方法。
【請求項3】
請求項1に記載の方法であって、
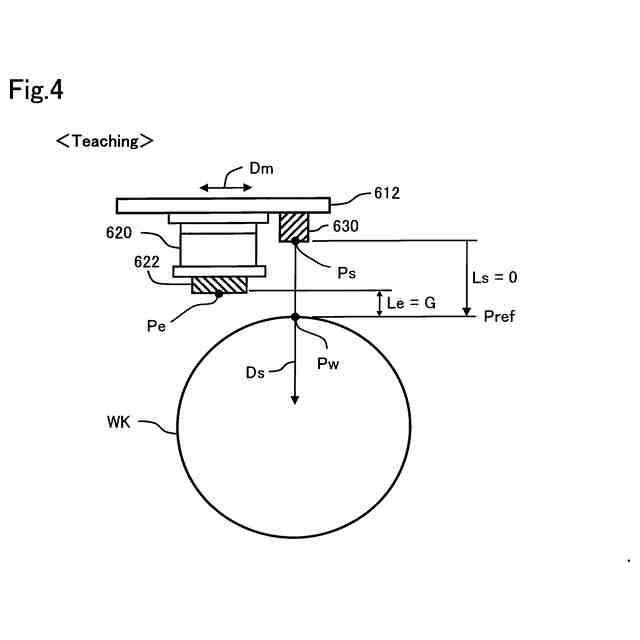
前記ティーチングで設定される教示点の位置は、前記測距装置から前記ワークまでの距離の測定値に応じて算出される前記エンドエフェクターから前記ワークまでの前記ロボット作業時における距離が、前記ロボット作業に適した設定距離に等しくなるように決定される、方法。
【請求項4】
請求項3に記載の方法であって、
前記工程(b)は、
(b1)複数の教示点を仮設定する工程と、
(b2)前記複数の教示点を辿るように前記ロボットアームを動作させ、前記複数の教示点の位置において前記測距装置による前記距離測定の結果を取得する工程と、
(b3)前記複数の教示点における前記距離測定の結果を用いて、各教示点での前記エンドエフェクターから前記ワークまでの前記ロボット作業時における前記距離が、前記設定距離に等しくなるように各教示点の位置を修正する工程と、
を含む方法。
【請求項5】
請求項1に記載の方法であって、
前記エンドエフェクターは、インク吐出ヘッドを含み、
前記ロボット作業は、前記インク吐出ヘッドを用いて前記ワークの表面のうちの曲面部分を含む印刷領域に印刷を実行する処理である、方法。
【請求項6】
請求項1に記載の方法であって、
前記可動ステージは、圧電アクチュエーターで駆動される、方法。
【請求項7】
ロボットシステムであって、
ロボットアームを含むロボットと、
前記ロボットアームの先端部に設置された可動ステージと、
前記可動ステージに設置された測距装置と、
前記可動ステージに設置されたエンドエフェクターと、
制御装置と、
を備え、
前記制御装置は、
(a)前記可動ステージを第1位置に設定することによって、前記測距装置を、ワークまでの距離を測定するための測距位置に位置決めする処理と、
(b)前記可動ステージが前記第1位置に設定された状態で、前記測距装置による距離測定を行うとともに前記距離測定の結果を用いてティーチングを実行する処理と、
(c)前記可動ステージを前記第1位置と異なる第2位置に設定することによって、前記エンドエフェクターを、前記ワークに対するロボット作業を行うための作業位置に位置決めする処理と、
(d)前記可動ステージが前記第2位置に設定された状態で、前記ワークに対する前記ロボット作業を実行する処理と、
を実行するように構成されている、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットを制御する方法、及び、ロボットシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、塗装対象物である車両または車両部品に対してノズルから塗料を吐出することで塗装を行う塗装ロボットが開示されている。この従来技術では、塗装対象物の塗装部位とヘッドのノズル吐出面との間の距離を測定する距離測定手段を用い、距離測定手段で計測された距離が規定範囲内にあるノズルから塗料を吐出させるように制御を実行する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/255896号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、ヘッドと距離測定手段の間に物理的な距離があるため、対象物の表面が曲面である場合には、対象物とヘッドとの距離を正確に測定できないという問題があった。また、距離測定を行いつつティーチングを行う場合に、正確なティーチングを行えないという問題があった。
【課題を解決するための手段】
【0005】
本開示の第1の形態によれば、ロボットを制御する方法が提供される。この方法は、(a)ロボットアームの先端部に設置された可動ステージを第1位置に設定することによって、前記可動ステージに設置された測距装置を、ワークまでの距離を測定するための測距位置に位置決めする工程と、(b)前記可動ステージが前記第1位置に設定された状態で、前記測距装置による距離測定を行うとともに前記距離測定の結果を用いてティーチングを実行する工程と、(c)前記可動ステージを前記第1位置と異なる第2位置に設定することによって、前記可動ステージに設置されたエンドエフェクターを、前記ワークに対するロボット作業を行うための作業位置に位置決めする工程と、(d)前記可動ステージが前記第2位置に設定された状態で、前記ワークに対する前記ロボット作業を実行する工程と、を含む。
【0006】
本開示の第2の形態によれば、ロボットシステムが提供される。このロボットシステムは、ロボットアームを含むロボットと、前記ロボットアームの先端部に設置された可動ステージと、前記可動ステージに設置された測距装置と、前記可動ステージに設置されたエンドエフェクターと、制御装置と、を備える。前記制御装置は、(a)前記可動ステージを第1位置に設定することによって、前記測距装置を、ワークまでの距離を測定するための測距位置に位置決めする処理と、(b)前記可動ステージが前記第1位置に設定された状態で、前記測距装置による距離測定を行うとともに前記距離測定の結果を用いてティーチングを実行する処理と、(c)前記可動ステージを前記第1位置と異なる第2位置に設定することによって、前記エンドエフェクターを、前記ワークに対するロボット作業を行うための作業位置に位置決めする処理と、(d)前記可動ステージが前記第2位置に設定された状態で、前記ワークに対する前記ロボット作業を実行する処理と、を実行するように構成されている。
【図面の簡単な説明】
【0007】
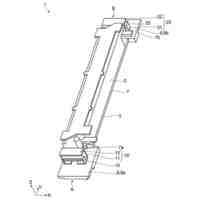
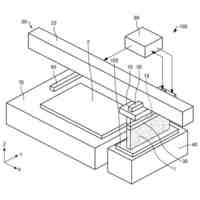
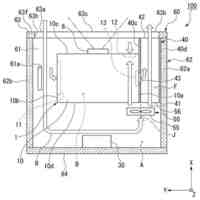
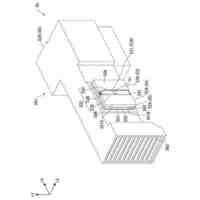
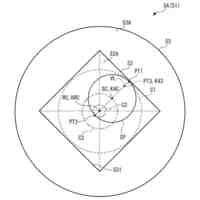
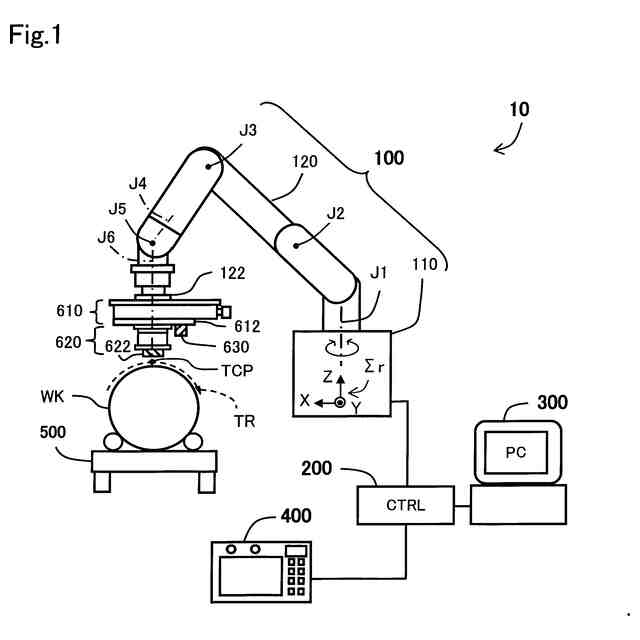
実施形態におけるロボットシステムの構成を示す説明図。
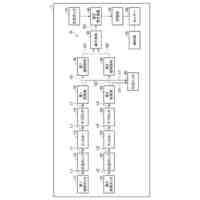
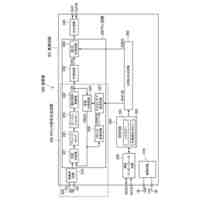
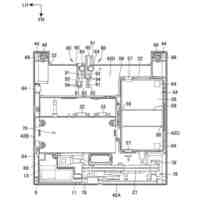
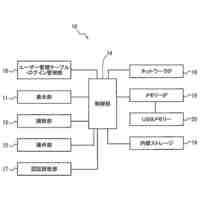
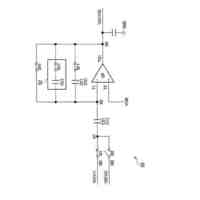
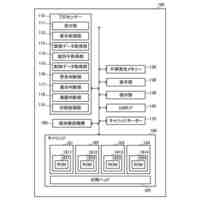
実施形態における情報処理装置の機能ブロック図。
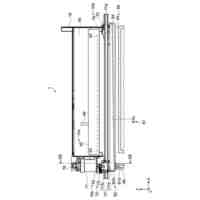
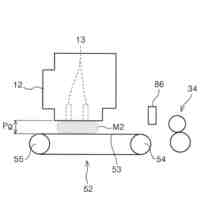
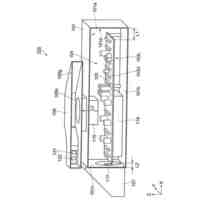
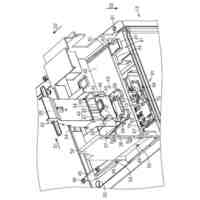
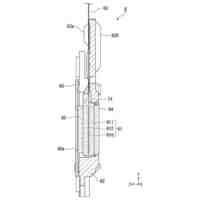
ティーチング実行時とロボット作業実行時の状態を示す説明図。
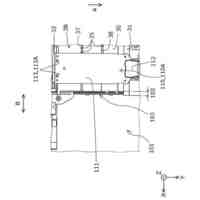
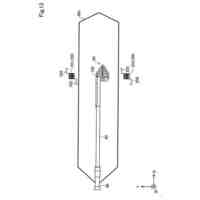
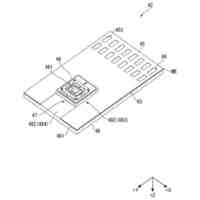
ティーチング実行時の状態を拡大して示す説明図。
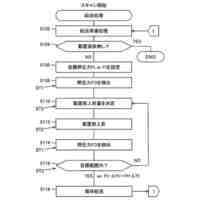
ティーチングとロボット作業の処理手順を示すフローチャート。
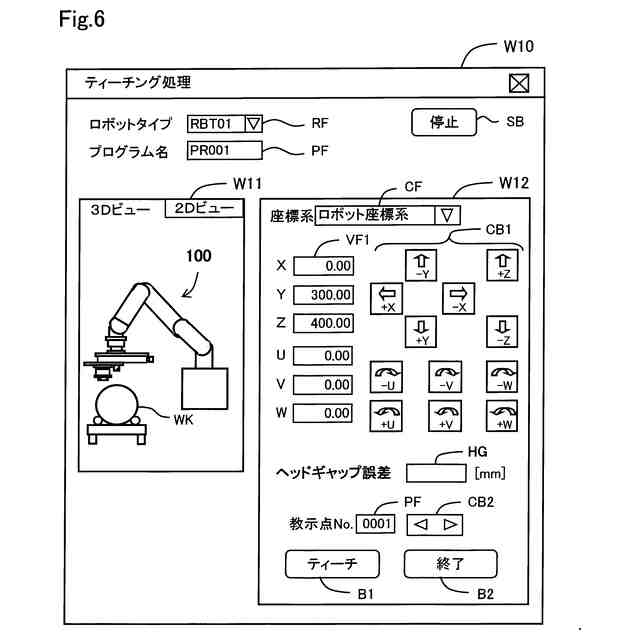
ティーチング処理用の操作画面の一例を示す説明図。
【発明を実施するための形態】
【0008】
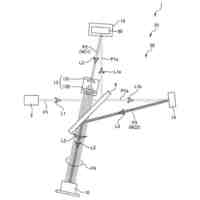
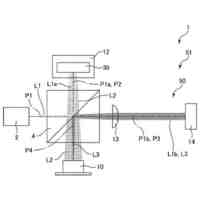
図1は、一実施形態におけるロボットシステムの一例を示す説明図である。このロボットシステム10は、ロボット100と、ロボット100を制御するロボットコントローラー200と、情報処理装置300と、ティーチングペンダント400と、ワークWKを載置する架台500とを備える。情報処理装置300は、例えばパーソナルコンピューターである。
【0009】
図1には、3次元空間の直交座標系を規定する3つの軸X,Y,Zが描かれている。X軸とY軸は水平方向の軸であり、Z軸は鉛直方向の軸である。この例では、XYZ座標系は、ロボット100に予め設定された基準点を原点とするロボット座標系である。
【0010】
ロボット100は、基台110と、ロボットアーム120と、を備えている。ロボットアーム120の先端部122には、可動ステージ612を含む移動装置610が装着されている。可動ステージ612には、エンドエフェクターとしてのインク吐出装置620と、測距装置630が設置されている。なお、インク吐出装置620と測距装置630は、取付補助部材を介して可動ステージ612に固定されるようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セイコーエプソン株式会社
印刷装置
1日前
セイコーエプソン株式会社
回路装置
今日
セイコーエプソン株式会社
記録装置
1日前
セイコーエプソン株式会社
液体吐出装置
6日前
セイコーエプソン株式会社
液体吐出装置
1日前
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
プロジェクター
6日前
セイコーエプソン株式会社
レーザー干渉計
6日前
セイコーエプソン株式会社
レーザー干渉計
6日前
セイコーエプソン株式会社
レーザー照射装置
1日前
セイコーエプソン株式会社
ロール体運搬用台車
2日前
セイコーエプソン株式会社
記録装置及び記録方法
8日前
セイコーエプソン株式会社
分周回路および発振器
6日前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
1日前
セイコーエプソン株式会社
プロジェクションシステム
5日前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
1日前
セイコーエプソン株式会社
液体吐出装置、液体吐出方法
1日前
セイコーエプソン株式会社
印刷方法および印刷システム
2日前
セイコーエプソン株式会社
電子機器、及びPOSシステム
1日前
セイコーエプソン株式会社
中継装置、及びPOSシステム
1日前
セイコーエプソン株式会社
回路基板の冷却構造、印刷装置
今日
セイコーエプソン株式会社
印刷装置、及び、その色補正方法
1日前
セイコーエプソン株式会社
画像読取装置および画像読取方法
2日前
セイコーエプソン株式会社
液体収容体、および、液体噴射装置
1日前
セイコーエプソン株式会社
液体吐出装置及び液体吐出システム
5日前
セイコーエプソン株式会社
媒体給送装置、及び、その制御方法
2日前
セイコーエプソン株式会社
反射型スクリーンおよび投射システム
5日前
セイコーエプソン株式会社
慣性センサー、慣性センサーの製造方法
1日前
セイコーエプソン株式会社
プログラマブルゲインアンプ及び回路装置
6日前
セイコーエプソン株式会社
波長変換装置、光源装置及びプロジェクター
8日前
セイコーエプソン株式会社
波長変換装置、光源装置及びプロジェクター
今日
セイコーエプソン株式会社
プロジェクションシステム、および調整機構
5日前
セイコーエプソン株式会社
液晶装置、光変調装置、およびプロジェクター
6日前
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
2日前
セイコーエプソン株式会社
機能素子実装デバイス、光源装置及び投射装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ