TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146485
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024047301
出願日
2024-03-22
発明の名称
ロボット、及びロボットの製造方法
出願人
カシオ計算機株式会社
代理人
個人
主分類
A63H
11/00 20060101AFI20250926BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】取り扱いやすさを向上させることができるロボット、及びロボットの製造方法を提供する。
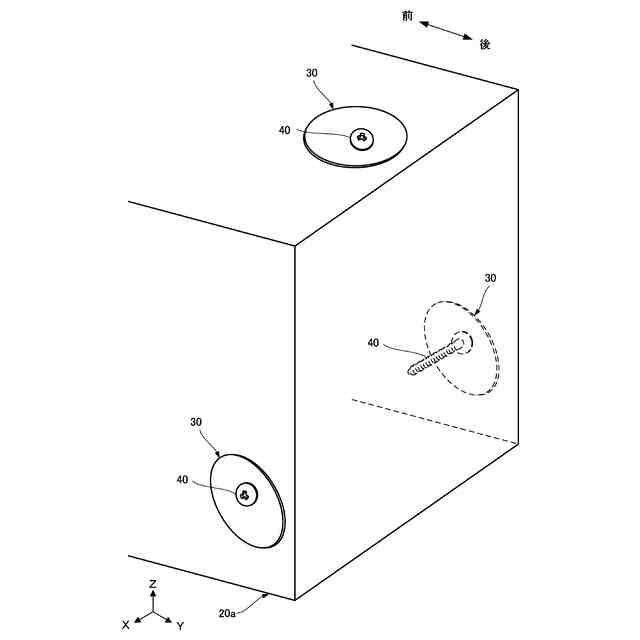
【解決手段】ロボット1は、外装部10と、外装部10に覆われている、ネジ穴21が設けられた本体部20と、外装部10の内面において、ネジ穴21に固定可能な位置に設けられていると共に、貫通孔が形成されている固定用部材30と、ネジ穴21に取り付けられることで、本体部20に対して固定用部材30に固定するためのネジ40と、を備え、ネジ穴21は、本体部20の一方の端部寄りに設けられ、固定用部材30は、一端が外装部10の内面に対して非固定状態に配置されていると共に、他端が外装部10の内面に固定されている。
【選択図】図3
特許請求の範囲
【請求項1】
外装部と、
前記外装部に覆われている、被取付部が設けられた本体部と、
前記外装部の内面において、前記被取付部に固定可能な位置に設けられていると共に、貫通孔が形成されている固定用部材と、
前記被取付部に取り付けられることで、前記本体部に対して前記固定用部材を固定するための取付部材と、を備え、
前記被取付部は、前記本体部の一方の端部寄りに設けられ、
前記固定用部材は、一端が前記外装部の内面に対して非固定状態に配置されていると共に、他端が前記外装部の内面に固定されている、ロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記固定用部材において、前記外装部の内面に対して非固定状態に配置されている前記一端と、前記外装部の内面に固定されている前記他端との間には、前記貫通孔が形成されている、請求項1に記載のロボット。
【請求項3】
前記被取付部は、前記外装部の一部が前記本体部から外されると、前記被取付部に取り付けられた前記取付部材が露出するように設けられている、請求項1に記載のロボット。
【請求項4】
前記外装部には、前記本体部の前記一方の端部と、前記被取付部に取り付けられた前記取付部材と、を露出させると共に、開閉可能なファスナ部が設けられている開口が形成されている、請求項3に記載のロボット。
【請求項5】
前記固定用部材の前記他端は、前記外装部の内面に縫い付けられて固定されている、請求項1に記載のロボット。
【請求項6】
前記固定用部材は、一端側の前記外装部が外されると、前記取付部材が露出するように固定されている、請求項1に記載のロボット。
【請求項7】
前記取付部材は、ネジであり、
前記被取付部は、前記ネジが捻じ込まれることで係合されるネジ穴であり、
前記ネジは、前記固定用部材に形成されている前記貫通孔に挿入されてから、前記ネジ穴に捻じ込まれることで、前記本体部に対して前記固定用部材を固定する、請求項1に記載のロボット。
【請求項8】
前記本体部には、前記一方の端部と反対側の他方の端部寄りに他方側被取付部が設けられ、
前記外装部の内面において、前記他方側被取付部に固定可能な位置に設けられていると共に、他方側貫通孔が形成されている他方側固定用部材と、
前記他方側被取付部に取り付けられ頭部を前記他方側貫通孔に挿入されることで、前記本体部に対して前記他方側固定用部材に固定するための他方側取付部材と、を備え、
前記他方側被取付部は、前記本体部の前記一方の端部とは反対側の他方の端部寄りに設けられている、請求項1から6のいずれか一項に記載のロボット。
【請求項9】
請求項1に記載の前記ロボットの製造方法であって、
前記固定用部材を、樹脂により、所定の厚さの平板状に、かつ、前記取付部材を挿入できる前記貫通孔を有するように形成するステップと、
形成された前記固定用部材をシート状の前記外装部の裏地に、前記固定用部材の前記貫通孔以外の部分にミシンの針を貫通させながら縫い付けるステップと、
前記外装部の裏地を表出させた後、前記外装部の表地を表出させながら、前記本体部を前記外装部で覆うステップと、
前記本体部を前記外装部で覆った状態で、前記本体部に設けられた前記被取付部に、前記取付部材を取り付けるステップと、
を含むロボットの製造方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、及びロボットの製造方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ロボットをペットのような親しみのある存在とするために、例えば、特許文献1には、ロボットの本体部を覆うように着脱可能な外装部を備えたペットロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2001-191276号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のロボットでは、外装部が取り外された状態では、ペットロボットの駆動部分が露出されるおそれがあった。また、外装部の一部が取り外された状態では、ロボットの組み立てやメンテナンスが行いにくくなるおそれがあった。結果として、ユーザとのふれあいを目的とするペットロボットの取り扱いやすさにおいて課題があった。
【0005】
本発明は、上記のような問題点を解決するためになされたものであり、取り扱いやすさを向上させることができるロボット、及びロボットの製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係るロボットは、外装部と、前記外装部に覆われている、被取付部が設けられた本体部と、前記外装部の内面において、前記被取付部に固定可能な位置に設けられていると共に、貫通孔が形成されている固定用部材と、前記被取付部に取り付けられることで、前記本体部に対して前記固定用部材を固定するための取付部材と、を備え、前記被取付部は、前記本体部の一方の端部寄りに設けられ、前記固定用部材は、一端が前記外装部の内面に対して非固定状態に配置されていると共に、他端が前記外装部の内面に固定されている。
【発明の効果】
【0007】
本発明によれば、取り扱いやすさを向上させることができるロボット、及びロボットの製造方法を提供することができる。
【図面の簡単な説明】
【0008】
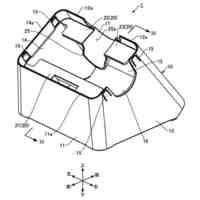
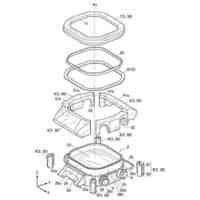
本発明の実施の形態に係るロボットの斜視図である。
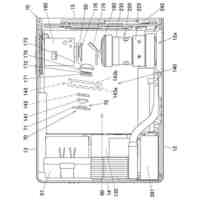
本発明の実施の形態に係るロボットの本体部を説明するための斜視図である。
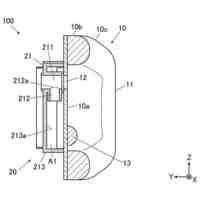
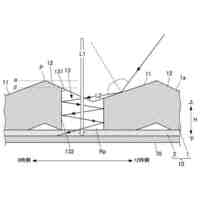
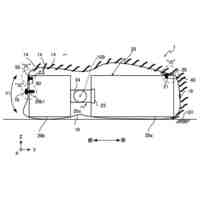
本発明の実施の形態に係るロボットの断面図である。
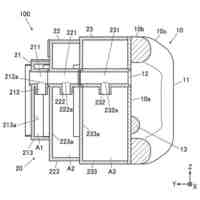
本発明の実施の形態に係る線ファスナが開口した状態を示す断面図である。
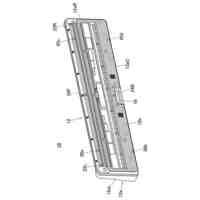
本発明の実施の形態に係る板状部材の位置関係を示す斜視図である。
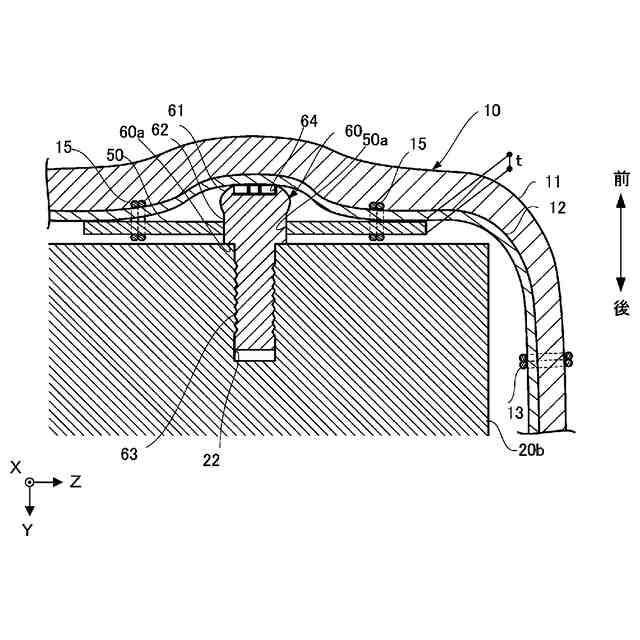
(a)は図3中の“VI”部の拡大図、(b)は図4中の“VI”部の拡大図である。
本発明の実施の形態に係る線ファスナが開口した状態を示す背面図である。
本発明の実施の形態に係る板状部材及び糸を示す図である。
図3中の“IX”部の拡大図である。
本発明の実施の形態に係る板状部材及び凸状部品を示す図であり、(a)は互いが係合していない状態の斜視図、(b)は互いが係合した状態の斜視図である。
(a)~(c)は、本発明の実施の形態に係る板状部材の取り付け方法を示す斜視図である。
図3中の“XI”部に着目した図であり、突出部と挿入穴とが係合していない状態にあるときの断面図である。
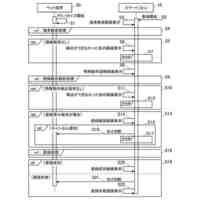
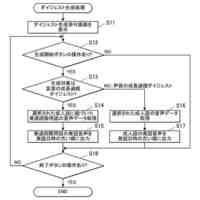
本発明の実施の形態に係るロボットの製造方法を示したフローチャートである。
【発明を実施するための形態】
【0009】
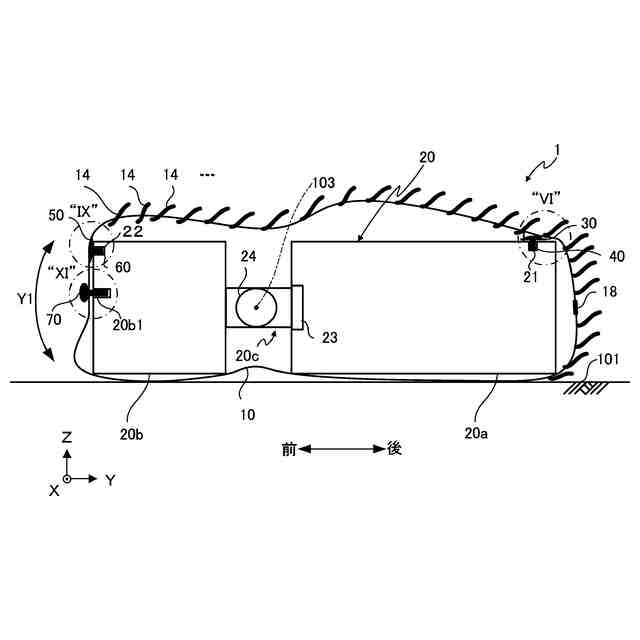
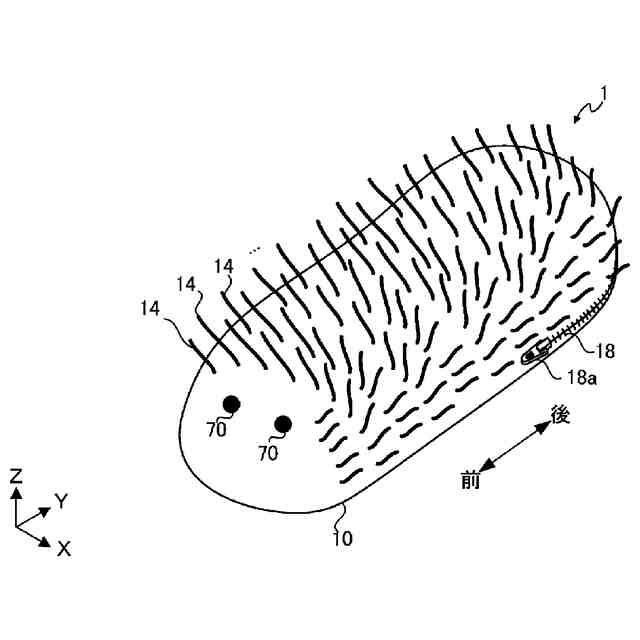
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、実施の形態の理解を容易にするため、相互に直交するXYZ座標を設定し、適宜参照する。図1中のY軸方向を前後の方向をとし、-Y軸方向を前方、+Y軸方向を後方とする。
【0010】
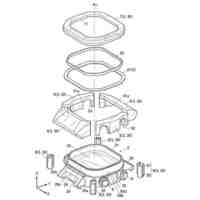
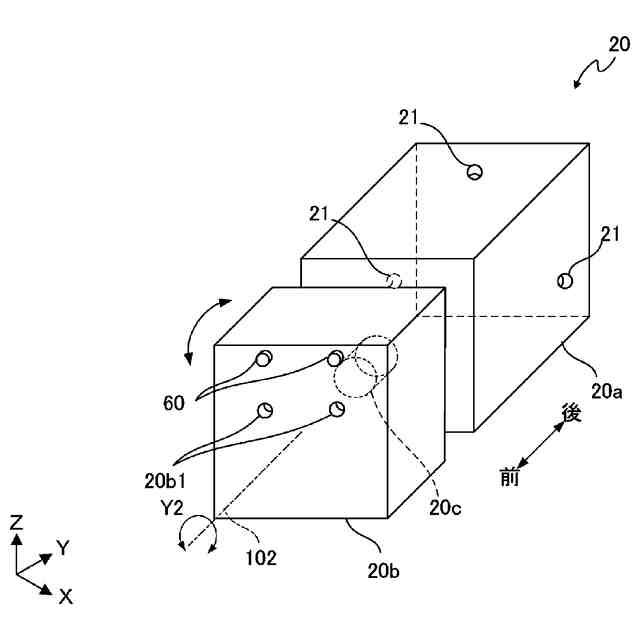
実施の形態に係るロボット1は、図1及び図2に示すように、小動物を模したペットロボットである。ロボット1には、小動物の目を模した装飾部を有する装飾部品70が前側に2つ設けられている。このように、ロボット1の前側は、小動物の顔部分を構成している。ロボット1は、図3及び図4に示すように、外装部10と、外装部10に覆われている本体部20と、板状部材30(固定用部材)と、ネジ40(取付部)と、板状部材50(他方側固定用部材)と、凸状部品60(他方側取付部材)とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カシオ計算機株式会社
支持台
3日前
カシオ計算機株式会社
減音器具
5日前
カシオ計算機株式会社
減音器具
5日前
カシオ計算機株式会社
電子鍵盤楽器
3日前
カシオ計算機株式会社
装飾板及び時計
4日前
カシオ計算機株式会社
光源装置及び投影装置
5日前
カシオ計算機株式会社
光源装置及び投影装置
5日前
カシオ計算機株式会社
光源装置及び投影装置
17日前
カシオ計算機株式会社
光源装置及び投影装置
17日前
カシオ計算機株式会社
端末装置及びプログラム
5日前
カシオ計算機株式会社
外装部品ユニット及び時計
3日前
カシオ計算機株式会社
電子機器、及び表示制御方法
7日前
カシオ計算機株式会社
カッターユニット及び切断装置
3日前
カシオ計算機株式会社
演奏装置、方法およびプログラム
5日前
カシオ計算機株式会社
補助バスマスタ回路及び電子機器
7日前
カシオ計算機株式会社
制御装置、方法およびプログラム
7日前
カシオ計算機株式会社
制御装置、方法およびプログラム
7日前
カシオ計算機株式会社
演奏装置、方法およびプログラム
4日前
カシオ計算機株式会社
発音装置及び音出力制御システム
17日前
カシオ計算機株式会社
ロボット、及びロボットの製造方法
3日前
カシオ計算機株式会社
情報処理装置、方法およびプログラム
3日前
カシオ計算機株式会社
制御装置、制御方法、及びプログラム
4日前
カシオ計算機株式会社
外装部品、外装部品ユニット及び時計
3日前
カシオ計算機株式会社
電子機器、登録処理方法及びプログラム
3日前
カシオ計算機株式会社
プログラム、電子機器及び登録処理方法
3日前
カシオ計算機株式会社
発音装置、接続装置及び音出力システム
17日前
カシオ計算機株式会社
情報処理装置、表示方法、及びプログラム
7日前
カシオ計算機株式会社
情報提供装置、情報提供方法及びプログラム
5日前
カシオ計算機株式会社
音声提供装置、音声提供方法及びプログラム
3日前
カシオ計算機株式会社
情報処理装置、プログラム及び情報処理方法
3日前
カシオ計算機株式会社
切断制御装置、切断制御方法及びプログラム
17日前
カシオ計算機株式会社
情報処理装置、表示制御方法、及びプログラム
3日前
カシオ計算機株式会社
電子楽器、電子楽器の制御方法及びプログラム
3日前
カシオ計算機株式会社
学習支援装置、学習支援方法およびプログラム
17日前
カシオ計算機株式会社
投影装置、投影装置の調整方法及びプログラム
4日前
カシオ計算機株式会社
投影装置、投影装置の調整方法及びプログラム
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ